BioWolf2000
-
Постов
110 -
Зарегистрирован
-
Посещение
Информация о BioWolf2000
-
Звание
Частый гость
")
- День рождения 21.02.1980
Посетители профиля
4 246 просмотров профиля


.thumb.jpg.cc42ffe1996c3491f572a36e5ebfc980.jpg)
-
TCP сервер на stm32
BioWolf2000 ответил DDDDRRRRR тема в STM
Неплохо получается freemodbus+freertos+lwip. https://www.embedded-experts.at/en/produkt/modbus-slave-evaluation-version/ Без проблем зарегистрироваться и скачать. В eval версии полностью исходники и примеры для STM32 под STM32CubeMX. На первое время отладку на ПК можно делать через Modbus Poll. Датчики повесить на Inputs, управляющие сигналы на Coils, настроечные параметры - Holdings, в разборе Coils обеспечить вызов функций. Доступ к переменным через Union union{ uint16_t arr[10]; struct{ uint16_t reg1; uint16_t reg2; // } } mbHoldings; Модбас работает через mbHoldings.arr, программа через mbHoldings.reg1 и тд ps. Есть перевод UM1713 на русский http://pro-interes.com/wp-content/uploads/2020/02/LwIP_TCP_IP_stack_descriptionRus.pdf Про Modbus можно почитать тут https://habr.com/ru/post/281430/ И рекомендую поставить сниффер TCP - Wireshark. Без него никак. Там кстати плагин modbus тоже есть -
 BioWolf2000 изменил фотографию своего профиля
BioWolf2000 изменил фотографию своего профиля -
I2C HAL DS2482
BioWolf2000 ответил simark1979 тема в STM
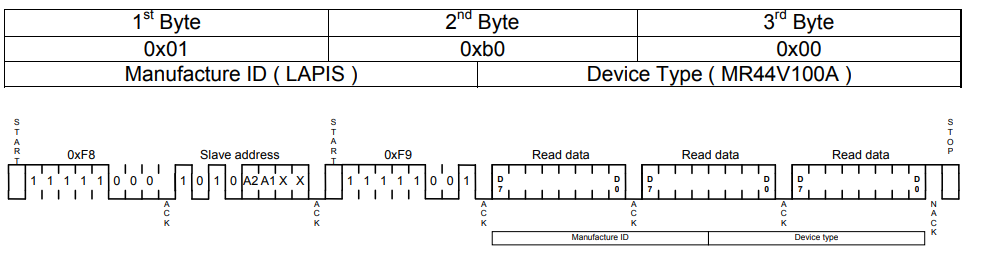
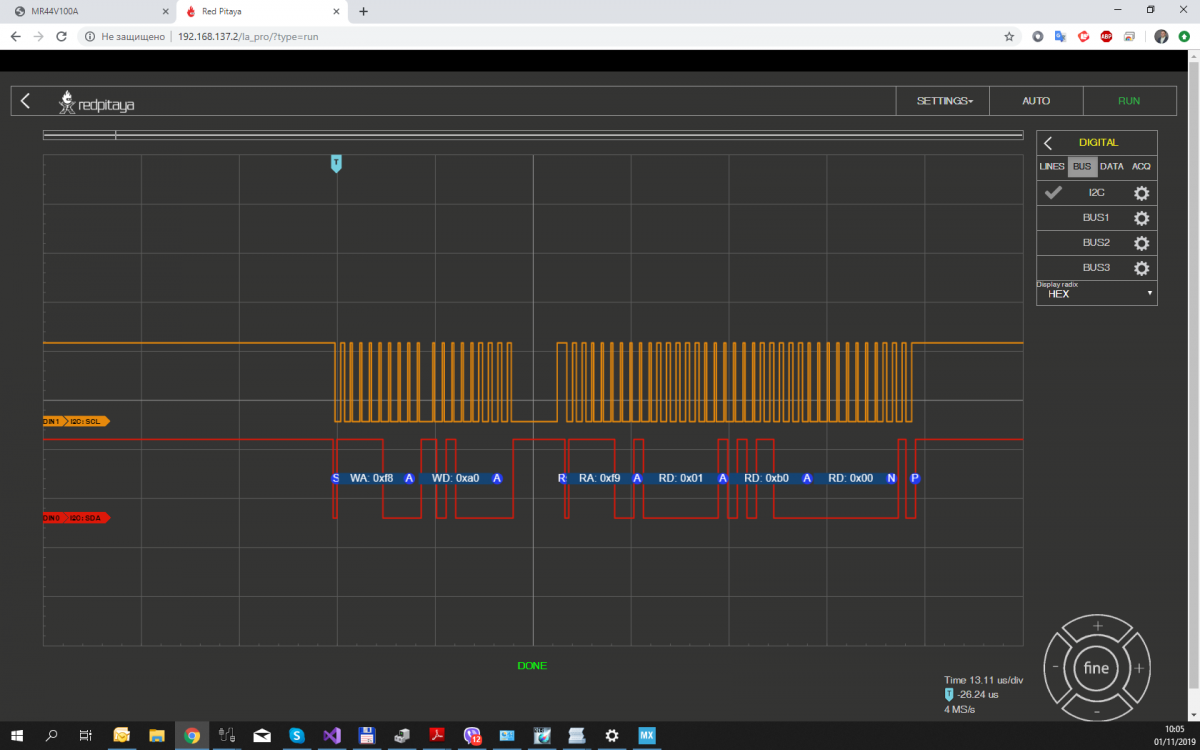
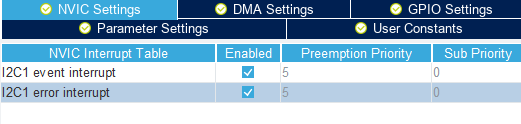
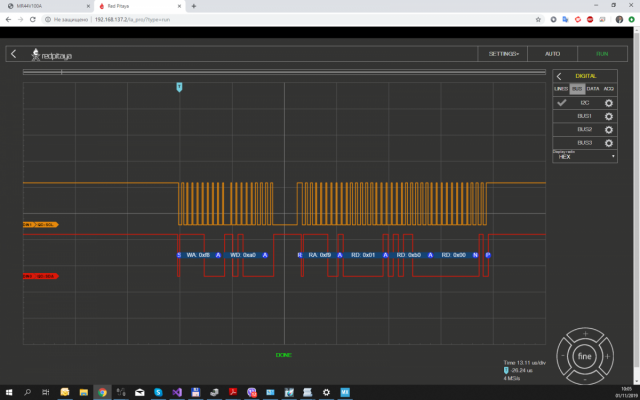
Может поможет, у меня похожая задача была - считать device id FRAM MR44V100A Device ID Read Sequence 1. Next to Start condition, send 0xF8. MR44V100A responds ACK signal. 2. Send the Slave address (WA16 and R/W are “Don’t care”). MR44V100A responds ACK signal. 3. Again next to Start condition, send 0xF9. MR44V100A responds ACK signal, then outputs 3 bytes of Device ID. 4. Send Stop condition and finish the sequence. Решил эту проблему через HAL так В кубе поставил галочки и написал вот такой код #include "MR44V100A.h" //private varibales static uint8_t device_address; static I2C_HandleTypeDef *hi2c; HAL_StatusTypeDef MR44V100A_Init(I2C_HandleTypeDef *handle_i2c, uint8_t dev_addr) { HAL_StatusTypeDef status; device_address = dev_addr; hi2c = handle_i2c; uint8_t tmp[3]; tmp[0]= (device_address << 1); status = HAL_I2C_Master_Seq_Transmit_IT(hi2c, 0xF8, &tmp[0], 1, I2C_FIRST_FRAME); if (status != HAL_OK) return status; while (HAL_I2C_GetState(hi2c) != HAL_I2C_STATE_READY) ; status = HAL_I2C_Master_Seq_Receive_IT(hi2c, 0xF9, tmp, 3, I2C_LAST_FRAME); if (status != HAL_OK) return status; while (HAL_I2C_GetState(hi2c) != HAL_I2C_STATE_READY) ; if ((tmp[0]==0x01)&&(tmp[1]==0xb0)&&(tmp[2]==0x00))//MR44V100A ID read OK return HAL_OK; else return HAL_ERROR; } HAL_StatusTypeDef MR44V100A_readByte(uint32_t register_address, uint8_t* data) { return MR44V100A_readBytes(register_address, 1, data); } HAL_StatusTypeDef MR44V100A_writeByte(uint32_t register_address, uint8_t data) { return MR44V100A_writeBytes(register_address, 1, &data); } HAL_StatusTypeDef MR44V100A_writeBytes(uint32_t register_address, uint32_t length, uint8_t* data) { assert_param((register_address + length - 1) <= 0x1FFFF); HAL_StatusTypeDef status = HAL_I2C_Mem_Write( hi2c, (device_address << 1) | (((register_address&(1 << 16)) ? 1 : 0) << 1), //add 16th bit of address(WA16) (uint16_t)register_address, I2C_MEMADD_SIZE_16BIT, data, length, 1000); while (HAL_I2C_IsDeviceReady(hi2c, (device_address << 1), 1, HAL_MAX_DELAY) != HAL_OK) ; return status; } HAL_StatusTypeDef MR44V100A_readBytes(uint32_t register_address, uint32_t length, uint8_t* data) { assert_param((register_address + length - 1) <= 0x1FFFF); return HAL_I2C_Mem_Read( hi2c, (device_address << 1) | (((register_address&(1 << 16)) ? 1 : 0) << 1), (uint16_t)register_address, I2C_MEMADD_SIZE_16BIT, data, length, 1000); } ps Посмотрел логическим анализатором шину, после первой посылки STOP не формируется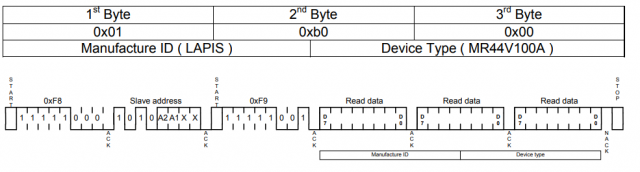
-
STM32H743ZI и VBAT Charging
BioWolf2000 опубликовал тема в ARM, 32bit
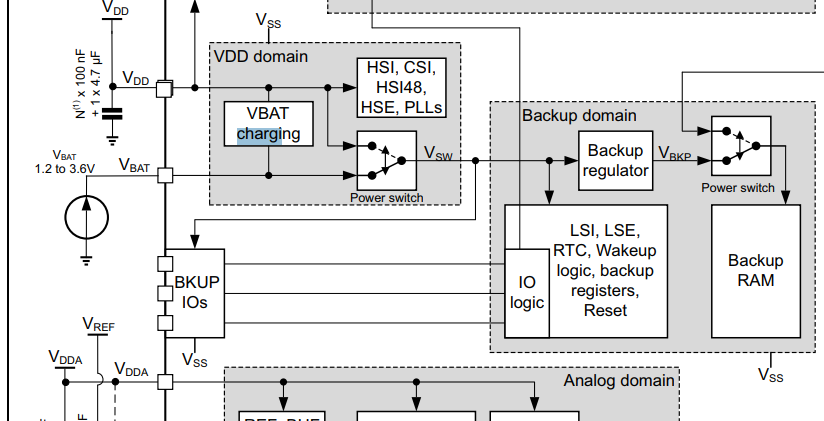
Изучаю H7 серию и натолкнулся в описании на Low-power modes: Sleep, Stop, Standby and VBAT supporting battery charging Означает ли это, что я могу поставить аккумулятор и не беспокоитбся о схеме зарядки? Аккумулятор типа такого https://www.digikey.com/product-detail/en/seiko-instruments/ML414H-IV01E/728-1052-1-ND/1889213