vitaly_n
-
Постов
103 -
Зарегистрирован
-
Посещение
-
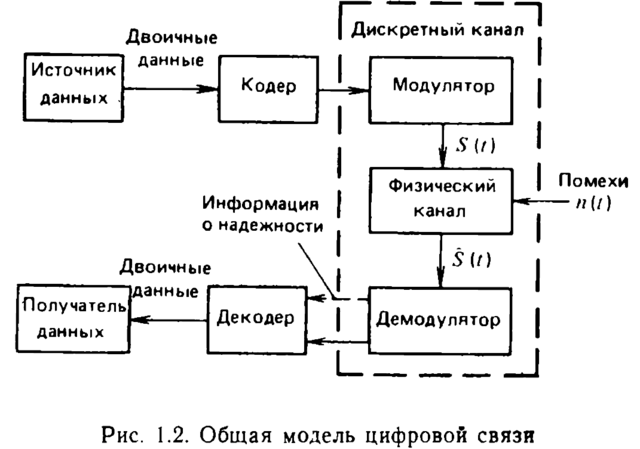
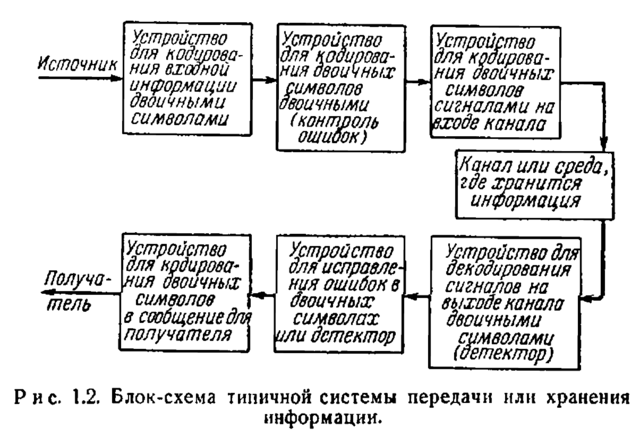
ECC с "подсказкой"
vitaly_n ответил vitaly_n тема в Математика и Физика
Решил вернуться к этой теме, чтобы закрыть её. В общем, вот две картинки. Первая - стандартная модель системы передачи или хранения информации, которая идёт в книжках по помехоустойчивому кодированию начиная чуть ли не с самого Шеннона, конкретно эта - из книги У.Питерсона "Коды, исправляющие ошибки", М., "Мир", 1964. Вторая - из книги Дж.Кларк, Дж.Кейн "Кодирование с исправлением ошибок в системах цифровой связи", М. "Радио и связь", 1987. Если внимательно присмотреться, то можно заметить, что во втором случае от демодулятора к декодеру идут две стрелочки - одна сплошная обозначает основной поток информации, а вторая пунктирная обозначает дополнительную информацию, которую я и имел в виду в первом сообщении про "подсказку". Как я правильно ощущал, я таки пытался "изобрести велосипед", и этот "велосипед" в данном случае называется код Рида-Соломона. В этом коде дополнительная информация называется "стирание", и обозначает она то, что демодулятор сразу помечает, что принятый символ был настолько плохого качества, что сразу понятно, что его проще выбросить, чем пытаться декодировать. А польза тут вот в чём. Например, возьмём код Рида-Соломона (15,9) (информация передаётся пакетами из 15 символов по 4 бита в каждом, из которых 9 - символов информационные, а 6 - проверочные). Согласно учебнику, этот код может исправлять до 3 ошибок, если у нас нет дополнительной информации от демодулятора. Однако, если у нас есть информация от демодулятора о том, в каких именно символах точно будут ошибки, то помеченных стираний этот код может исправить вдвое больше - скажем, 2 ошибки и 2 стирания или 1 ошибку и 4 стирания.