Zuse
-
Постов
561 -
Зарегистрирован
-
Посещение
Весь контент Zuse
-
Синхронный детектор на 250-350 кГц
Zuse ответил Zuse тема в Вопросы аналоговой техники
Ох, сколько написали! Спасибо! Как правильно подметил Plain, речь о ТВГ (правда не о том, которым я занимался раньше) Предложенные схемы хороши, когда общий вывод конденсаторного датчика не связан с общим. У меня, к сожалению, он с общим связан. Т.к. общий вывод - это металлизированный полусферический резонатор ТВГ и с ним так же взаимодействуют электроды электростатического возбуждения. Для моего случая в литературе предложена следующая схема: Моя схема (дифференциальная) справа. Меандр, имхо, в этом случае не канает, т.к. ОУ будут звенеть или возбуждаться Касаемо предложения выбросить синхронный детектор и делать все в цифре - я об этом думал. В моем случае нужно метить АЦП в верхушки синусов, но есть сомнения что выйдет получить таким образом высокую точность измерения, ибо я не случайно собираюсь возбуждать два датчика разными частотами (250К и 350К). Я заложу этот вариант в схему, но синхронный детектор, как альтернативу, тоже хочу сделать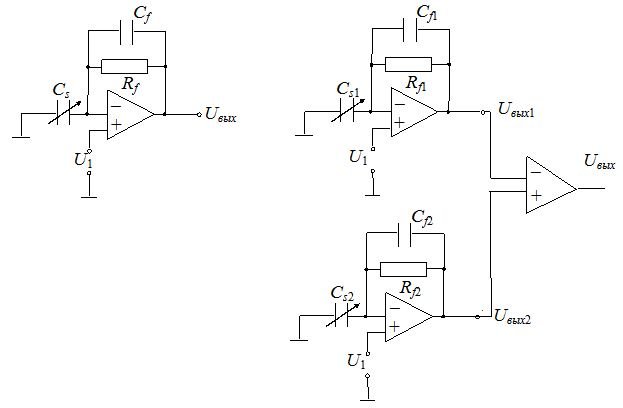
-
Силовой MOSFET издает звук
Zuse опубликовал тема в Силовая Преобразовательная Техника
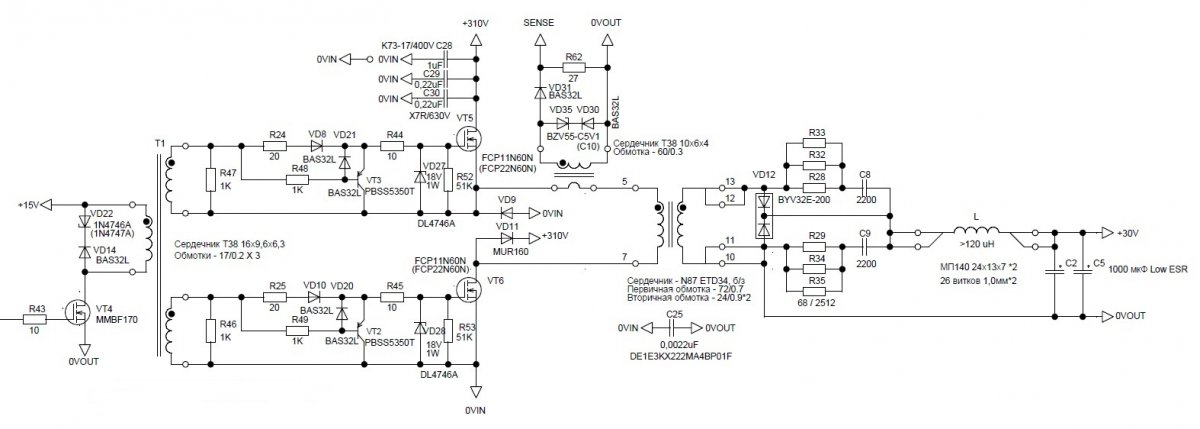
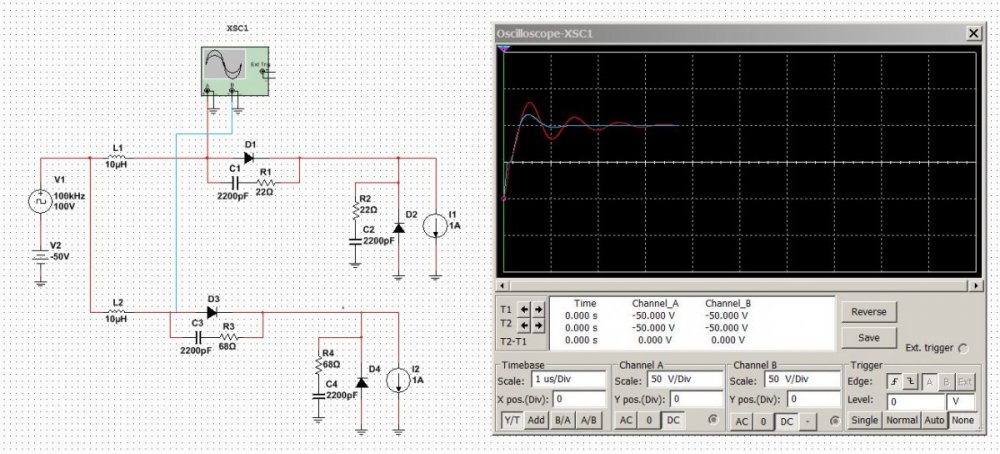
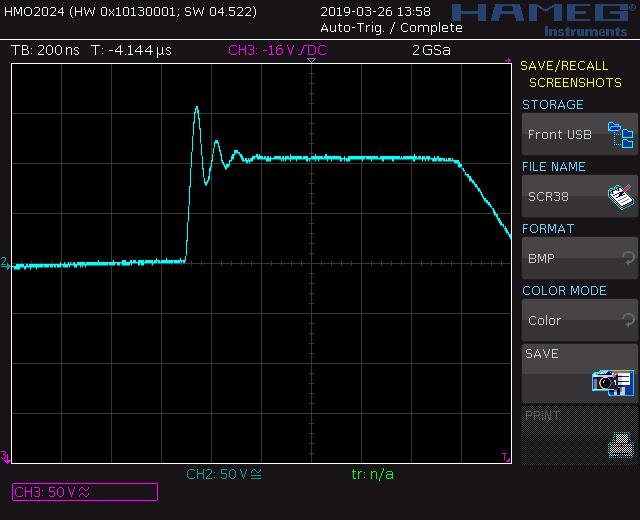
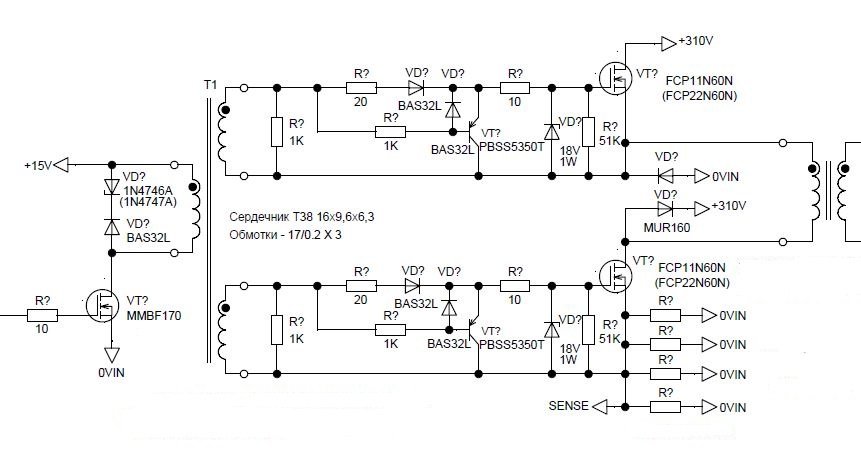
Коллеги, продолжаю собирать, когда удается выкроить время, ACDC прямоходовый преобразователь 27В/100Вт. Уже успел создать пару тем, и вот снова столкнулся с непонятным. На рисунке показана силовая часть источника. Прежде чем включаться на ~220В, решил проверить работу источника, так сказать, в облегченном режиме. На хх вместо переменного напряжения на вход подал постоянное 50В, и, плавно увеличивая его, стал смотреть выход и ШИМ. При входном 65В на выходе установилось 30В (полагаю из-за хх выпрямитель превращается в подобие детектора) и обратная связь начала ограничивать ШИМ, стабилизируя выходное напряжение. При этом возникла странность - VT6 стал издавать легкие цыкающие звуки, возникающие в тот момент, когда ОС прерывала ШИМ на несколько мс. На R62 при этом картина особо не менялась - в моменты переключения присутствовали выбросы, но их амплитуда существенно не увеличивалась. Амплитуда импульсов на затворе была нормальной. Когда занимался электроприводом, сталкивался с ситуациями, когда MOSFET начинал "звучать" -это было связано со "сквозняками". Но тут "косой" мост, и что-то не вижу, где может возникнуть "сквозняк". Вопрос: может ли MOSFET "звучать" не из-за сквозняка?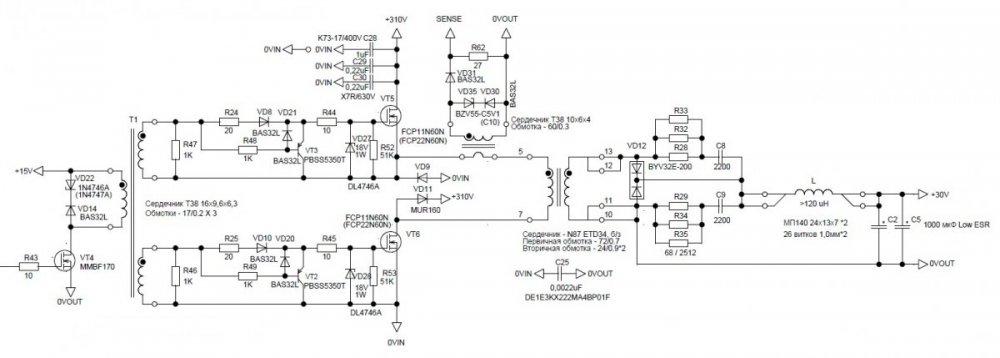
-
снаббер поменять?
-
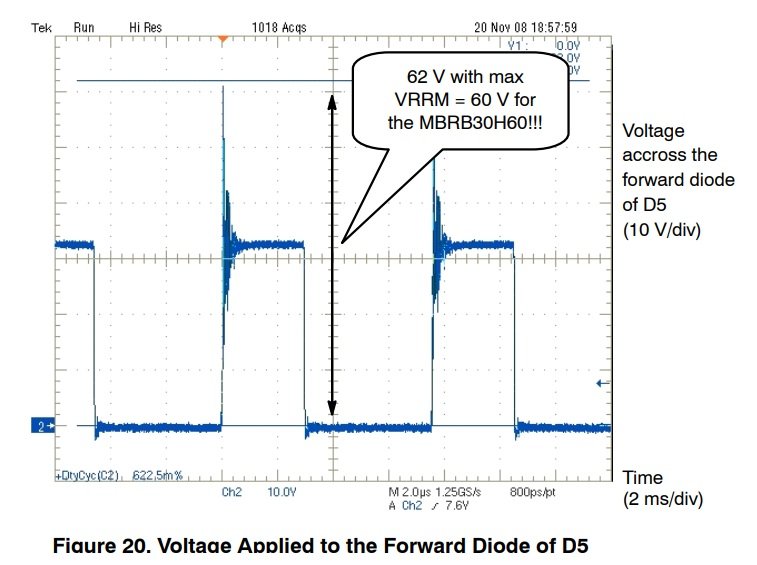
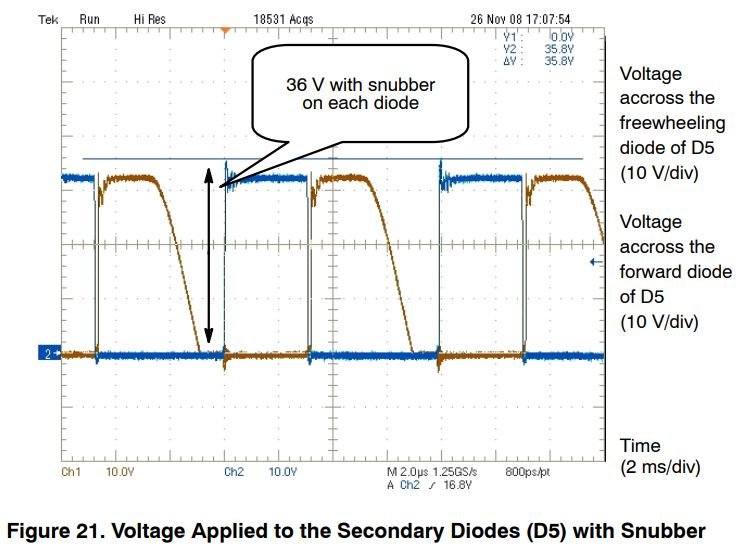
Да, как бы собираю. И обнаружил такой же величины выброс (в процентном отношении к амплитуде импульса) как в покупном БП. На входе трансформатора импульсы без всяких звонов, а на выходе такое непотребство... Пробовал прокладывать между обмотками заземленный на 0VIN экран из медной фольги - ноль результата. Пробовал мотать вторичную обмотку между двумя половинами первичной - ноль результата. Диод конечно можно заменить, но хочется устранить выброс. В своей разработке частично опирался на данный AppNote: https://www.onsemi.com/pub/Collateral/AND8373-D.PDF в нем рассмотрен прямоход на "косом мосте" 12В/100Вт И даны осциллограммы напряжений на диодах без снаббера и с оным: У меня же со снаббером 22Ом/2200пФ такого благолепия никак не выходит. Индуктивность первичной обмотки у меня примерно как в том проекте ~ 10мГн, но коэф. трансформации - 0.33 против 0.1. Т.е. индуктивность вторичной обмотки у меня в 10 раз больше, соответственно больше и индуктивность рассеяния на второй стороне. Возможно, это объясняет разницу.
-
Выброс напряжения на выпрямительном диоде
Zuse опубликовал тема в Силовая Преобразовательная Техника
Здравствуйте, коллеги Делаю ACDC прямоходовый преобразователь 27В/100Вт. Собираю по частям, проверяя поэтапно правильность схемных решений. Кое-что мне не понравилось, и для сравнения я решил изучить работу имеющегося у меня покупного прямохода 27В/200Вт. Меня интересовал форма импульса на выходе трансформатора, а точнее размах "звона". Вот напряжение на анодах выпрямительной диодной сборки BYV42Е-200, которое мне удалось запечатлеть в покупном источнике на холостом ходу: Смотрел как диф.пробником так и щупом с коротким общим (пружинка) прямо на анодах. Напряжение подскакивает до 150В. Я так и не понял, что это за диод, и какое у него макс. обр. напряжение, т.к. в даташите нет наименования "BYV42Е-200", а есть "BYV42Е", для которого макс. обр. напряжение составляет 150В, и есть "BYV42ЕB", для которого макс. обр. напряжение составляет 200В... Но даже если 200, то на максимальном сетевом обратное напряжение с учетом выброса будет очень близко к предельному. С другой стороны, в литературе пишут, что для кремниевых диодов обратный пробой является обратимым, и диод восстанавливается при уменьшении напряжения. Вопрос: можно ли использовать это свойство для срезания выброса, или же восстановление после пробоя происходит медленно, и через диод потечет сквозной ток?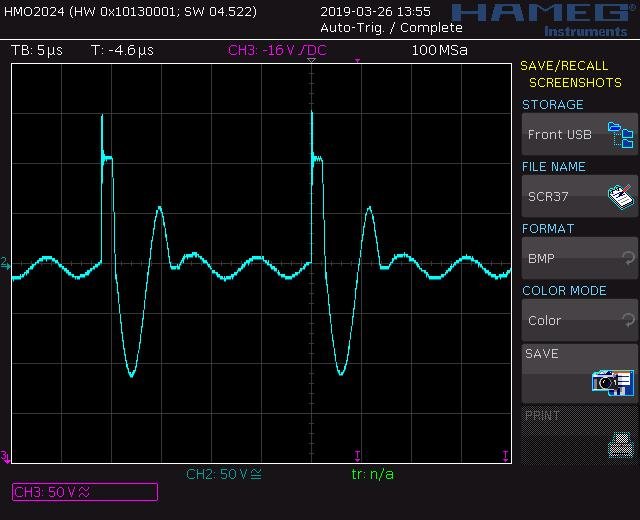
-
UC3844 и "slope compensation"
Zuse опубликовал тема в Силовая Преобразовательная Техника
Здравствуйте, коллеги Мне в руки попал AC-DC преобразователь на 27В/8А. Источник собран по схеме прямоходового преобразователя на UC3844, и на плате преобразователя есть узел т.н. "slope compensation": В даташите и в попадавшихся книгах по импульсным преобразователям говорится, что эта функция нужна при DC>0.5, в то время как у UC3844 длительность импульса не может превышать 50%. Вопрос: нужен ли "Slope compensation" в прямоходовом преобразователе на UC3844/UC3845 ?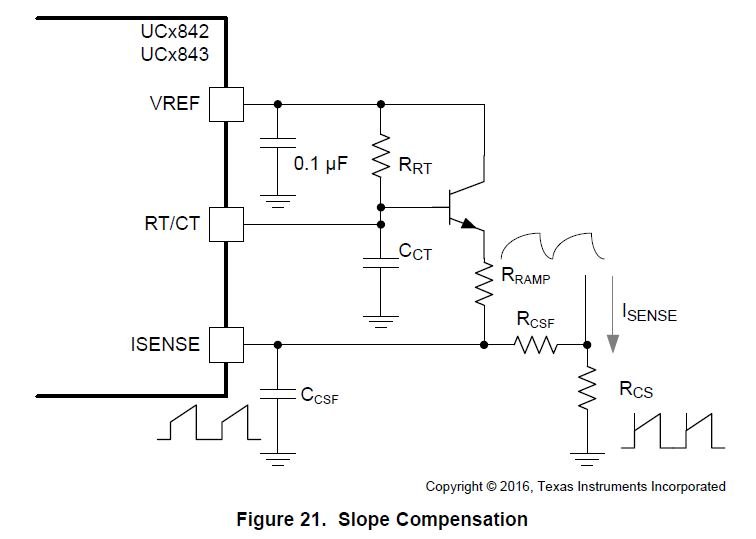
-
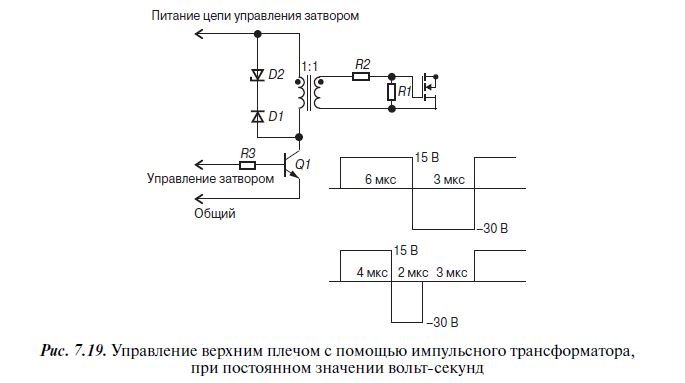
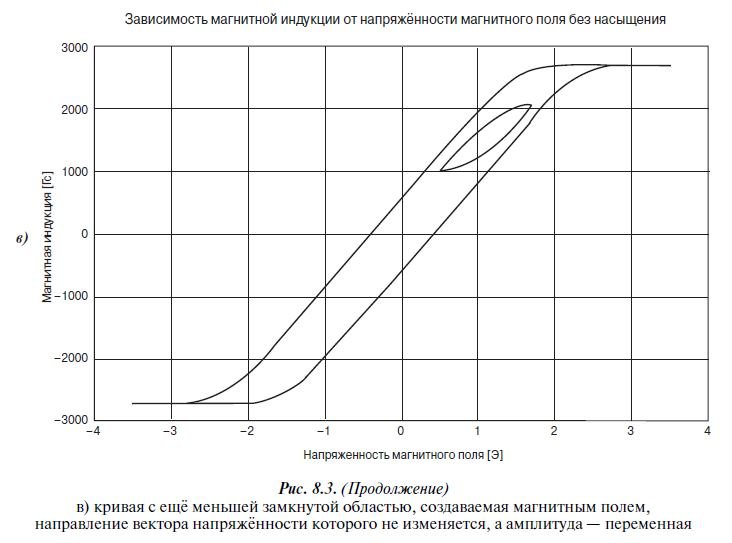
я про это читал) В той же книге есть график намагничивания однонаправленным полем неназванного материала, смахивающего по цифрам на феррит: Судя по графику, наличие в токе постоянной составляющей само по себе не вызывает насыщения ферритового сердечника. Однако у меня с проверяющим моей схемы: в которой применен приведенный способ управления первичной обмоткой GDT, вышел небольшой спор касательно того, не насытится ли сердечник трансформатора. Проверяющий упирал на то, что в дросселях, работающих на постоянном токе, как правило используются материалы с невысокой проницаемостью (пермаллой, например), что, мол, феррит для этого в принципе может не покатить, ну а я привел в пример трансформатор прямоходового преобразователя, в токе намагничивания первичной обмотки которого тоже есть постоянная составляющая... Но сомнения все-таки закрались, и я решил спросить мнения сведущих людей
-
Управление силовым MOSFET через трансформатор
Zuse опубликовал тема в Вопросы аналоговой техники
Коллеги, здравствуйте. В книге "Импульсные источники питания" (автор Р. Мэк), да и не только в ней, встречается в различных вариациях следующая схема управления силовым ключом: Вопрос: может ли то, что направление вектора напряженности магнитного поля не меняется, оказать на трансформатор существенное негативное влияние?