Koteyk0o
-
Постов
4 -
Зарегистрирован
-
Посещение
-
stm32f103c8t6 + CAN + Hard Fault
Koteyk0o ответил Koteyk0o тема в ARM, 32bit
Все заработало, извиняюсь, мой косяк Если у кого-то принимаются неверные данные с помощью MCP2515 CAN модуля для ардуино, то проверьте какой у вас там установлен кварц. Обычно там стоит кварц на 16 МГц, но у меня почему-то стоял кварц на 8 МГц, из-за этого модуль работал неправильно. Его можно или перепаять, или поменять значения квантов времени в библиотеке Спасибо за советы, ретрансмит включу обратно
-
stm32f103c8t6 + CAN + Hard Fault
Koteyk0o ответил Koteyk0o тема в ARM, 32bit
Спасибо большое, отключил AutoRetransmission и все ок, данные передаются в нужном промежутке времени Передается не то, ID указан один, приходит вообще другое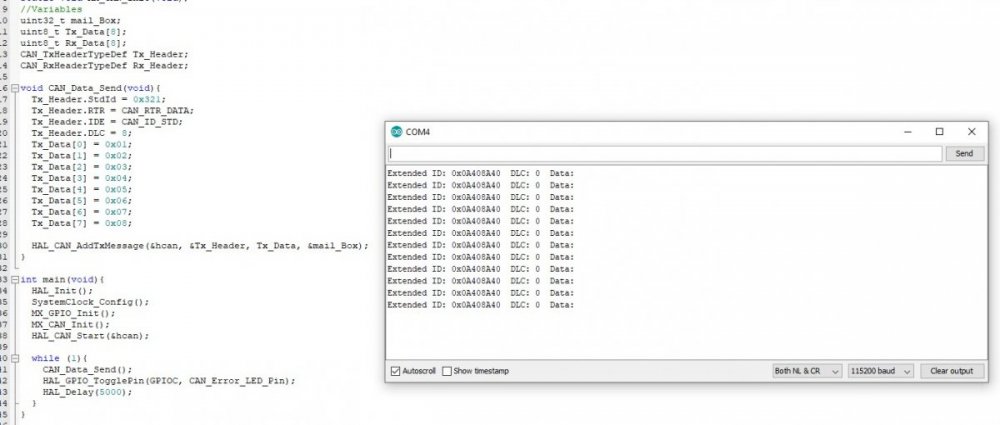
-
stm32f103c8t6 + CAN + Hard Fault
Koteyk0o ответил Koteyk0o тема в ARM, 32bit
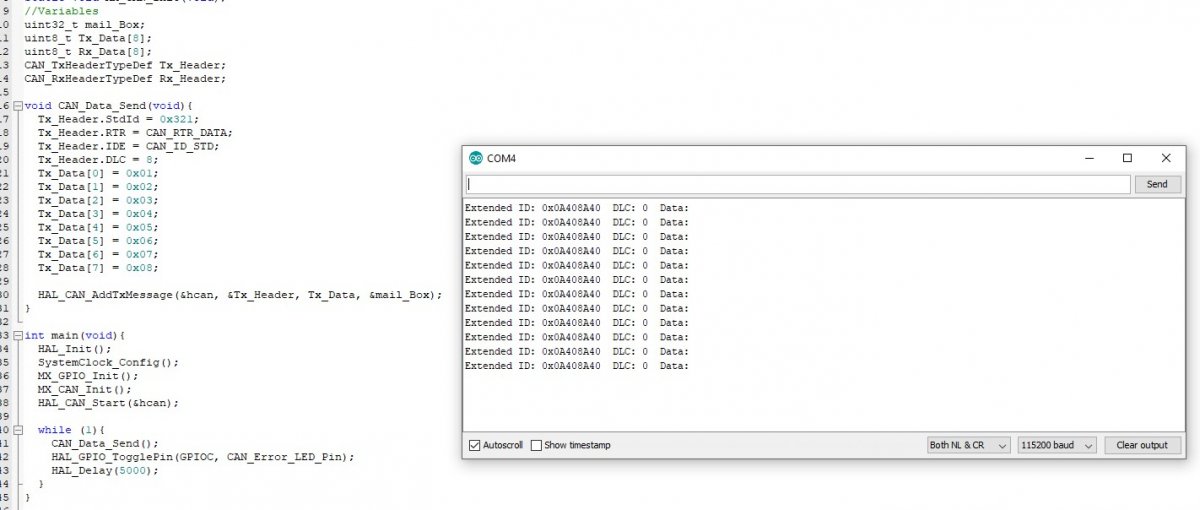
Да, похоже была ошибка с почтовым ящиком в функции HAL_CAN_AddTxMessage void CAN_Data_Send(void){ CAN_TxHeaderTypeDef Tx_Header; Tx_Header.StdId = 0x321; Tx_Header.ExtId = 0x01; Tx_Header.RTR = CAN_RTR_DATA; Tx_Header.IDE = CAN_ID_STD; Tx_Header.DLC = 2; uint32_t mail_Box; uint8_t Tx_Data[8] = { 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08}; HAL_CAN_AddTxMessage(&hcan, &Tx_Header, Tx_Data, &mail_Box); } С таким кодом контроллер работает, мигает встроенным светодиодом, функция отправки работает, отправка возвращает HAL_OK. Но. После отправки ОДНОГО сообщения шина сходит с ума, и ардуина с CAN Shield принимает кучу одинаковых пустых сообщений в огромнейшем колличестве до перезагрузки stm32 Я так понимаю это уже какая-то аппаратная проблема? Потому что по дебагу вроде бы все отлично, отправляется сообщение, дальше дергается нога GPIO, задержка, и так по кругу, все как и должно быть.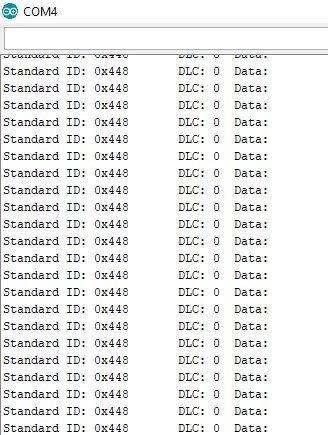
-
stm32f103c8t6 + CAN + Hard Fault
Koteyk0o опубликовал тема в ARM, 32bit
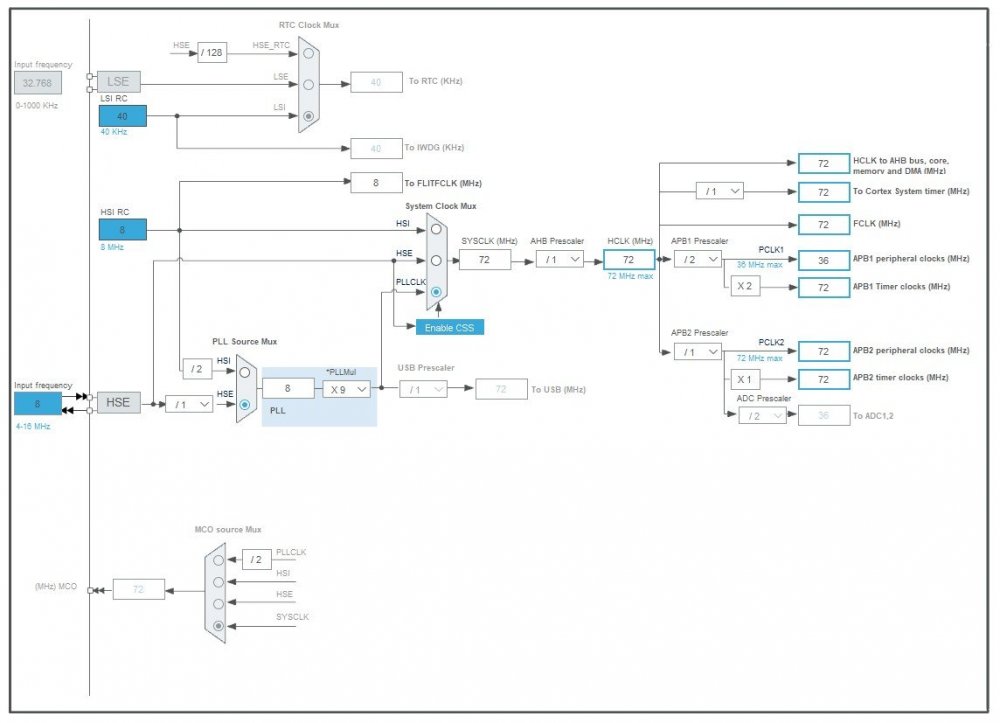
Всем привет Использую stm32f103c8t6 в связке с MCP2551, с другой стороны к нему подключен CAN Shield для Arduino, чтобы ловить пакеты. При включении со стороны STM32 приходят 2 пустых пакета с заголовком (насколько я понимаю) После этого STM32 уходит в Hard Fault, тактирование я вроде бы настроил правильно, кванты времени выставил для скорости 500 кбит Код генерировал в STM32CubeMX, а отладку провожу в Keil uVision5 Честно говоря это мои первые попытки работы с CAN протоколом, да и до этого я с STM32 не работал, но похоже я что-то делаю не так #include "main.h" CAN_HandleTypeDef hcan; void SystemClock_Config(void); static void CAN_Data_Send(void); static void MX_GPIO_Init(void); static void MX_CAN_Init(void); void CAN_Data_Send(void){ CAN_TxHeaderTypeDef Tx_Header; Tx_Header.StdId = 0x201; Tx_Header.IDE = CAN_ID_STD; Tx_Header.RTR = CAN_RTR_DATA; Tx_Header.DLC = 0x08; uint8_t Tx_Data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08}; HAL_CAN_AddTxMessage(&hcan, &Tx_Header, Tx_Data, (uint32_t *)CAN_TX_MAILBOX0); } int main(void){ HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_CAN_Init(); while (1){ HAL_Delay(500); CAN_Data_Send(); HAL_GPIO_TogglePin(GPIOC, CAN_Error_LED_Pin); } } void SystemClock_Config(void){ RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){ Error_Handler(); } RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){ Error_Handler(); } } static void MX_CAN_Init(void){ hcan.Instance = CAN1; hcan.Init.Prescaler = 9; hcan.Init.Mode = CAN_MODE_NORMAL; hcan.Init.SyncJumpWidth = CAN_SJW_1TQ; hcan.Init.TimeSeg1 = CAN_BS1_4TQ; hcan.Init.TimeSeg2 = CAN_BS2_3TQ; hcan.Init.TimeTriggeredMode = DISABLE; hcan.Init.AutoBusOff = DISABLE; hcan.Init.AutoWakeUp = ENABLE; hcan.Init.AutoRetransmission = ENABLE; hcan.Init.ReceiveFifoLocked = DISABLE; hcan.Init.TransmitFifoPriority = DISABLE; if (HAL_CAN_Init(&hcan) != HAL_OK){ Error_Handler(); } } static void MX_GPIO_Init(void){ GPIO_InitTypeDef GPIO_InitStruct = {0}; __HAL_RCC_GPIOC_CLK_ENABLE(); __HAL_RCC_GPIOD_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE(); HAL_GPIO_WritePin(CAN_Error_LED_GPIO_Port, CAN_Error_LED_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(LED_Output_GPIO_Port, LED_Output_Pin, GPIO_PIN_RESET); GPIO_InitStruct.Pin = CAN_Error_LED_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(CAN_Error_LED_GPIO_Port, &GPIO_InitStruct); GPIO_InitStruct.Pin = Button_1_Pin|Button_2_Pin; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Pull = GPIO_NOPULL; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); GPIO_InitStruct.Pin = LED_Output_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(LED_Output_GPIO_Port, &GPIO_InitStruct); } void Error_Handler(void){ }