p_v
-
Постов
148 -
Зарегистрирован
-
Посещение
Информация о p_v
-
Звание
Частый гость
")
Посетители профиля
2 155 просмотров профиля

-
Подскажите с алгоритмом определения фундаментальной частоты
p_v опубликовал тема в Алгоритмы ЦОС (DSP)
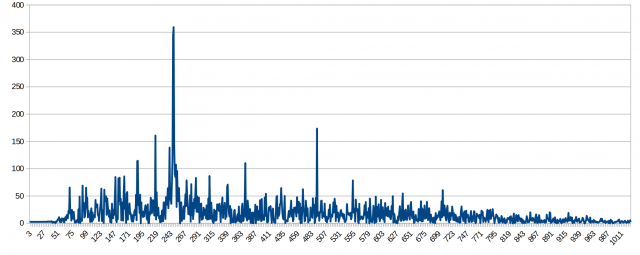
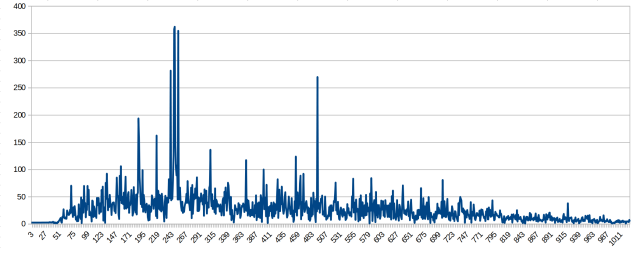
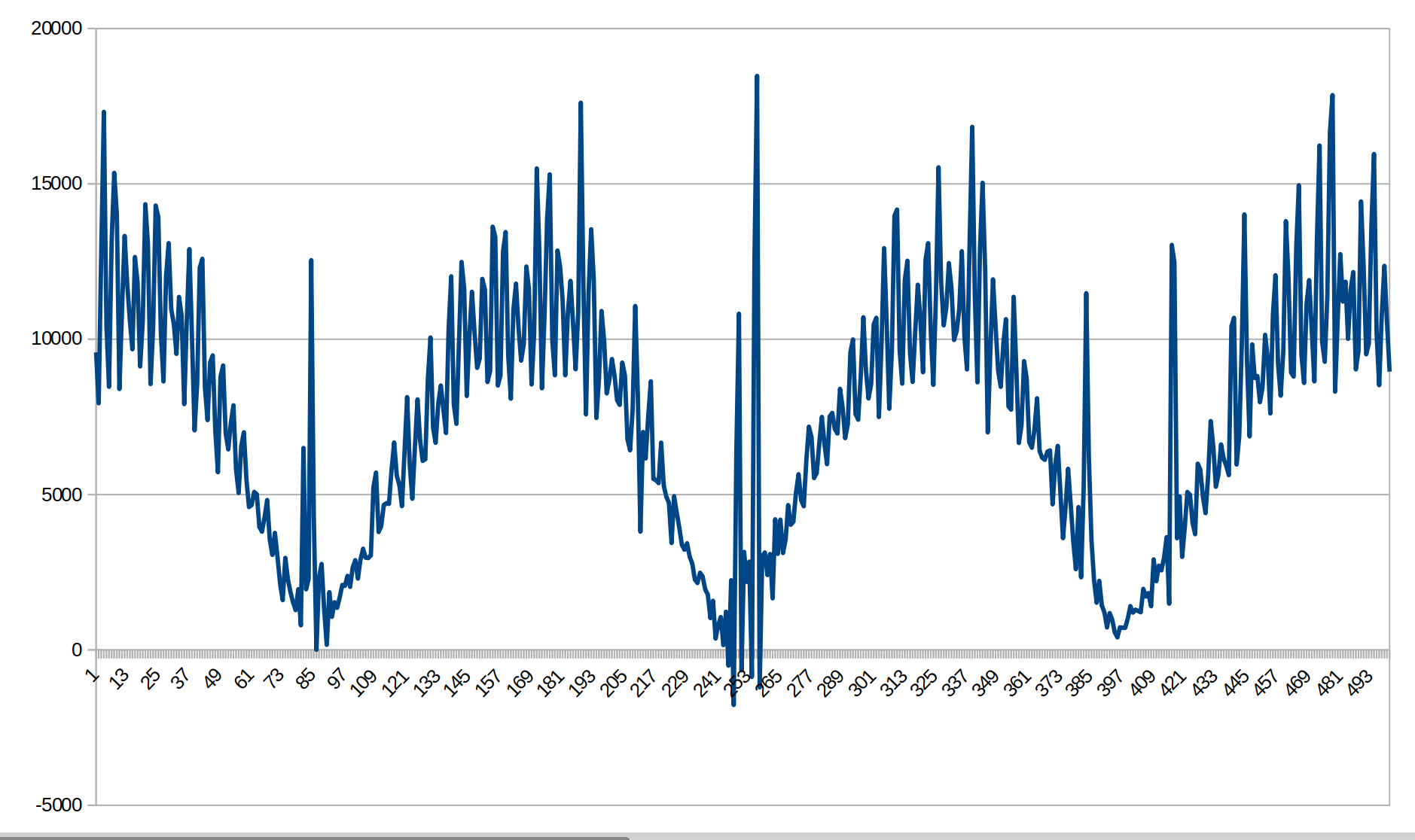
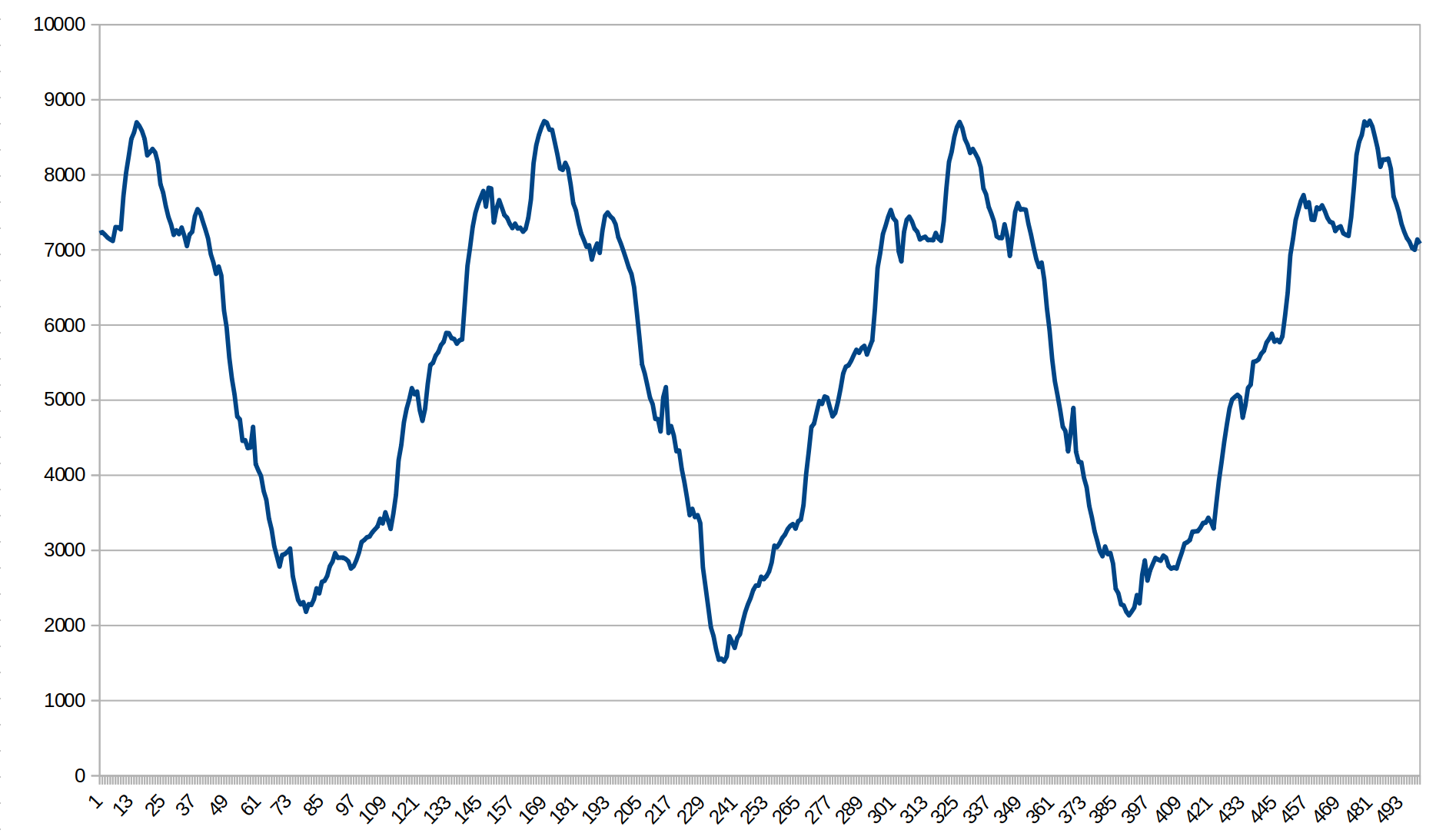
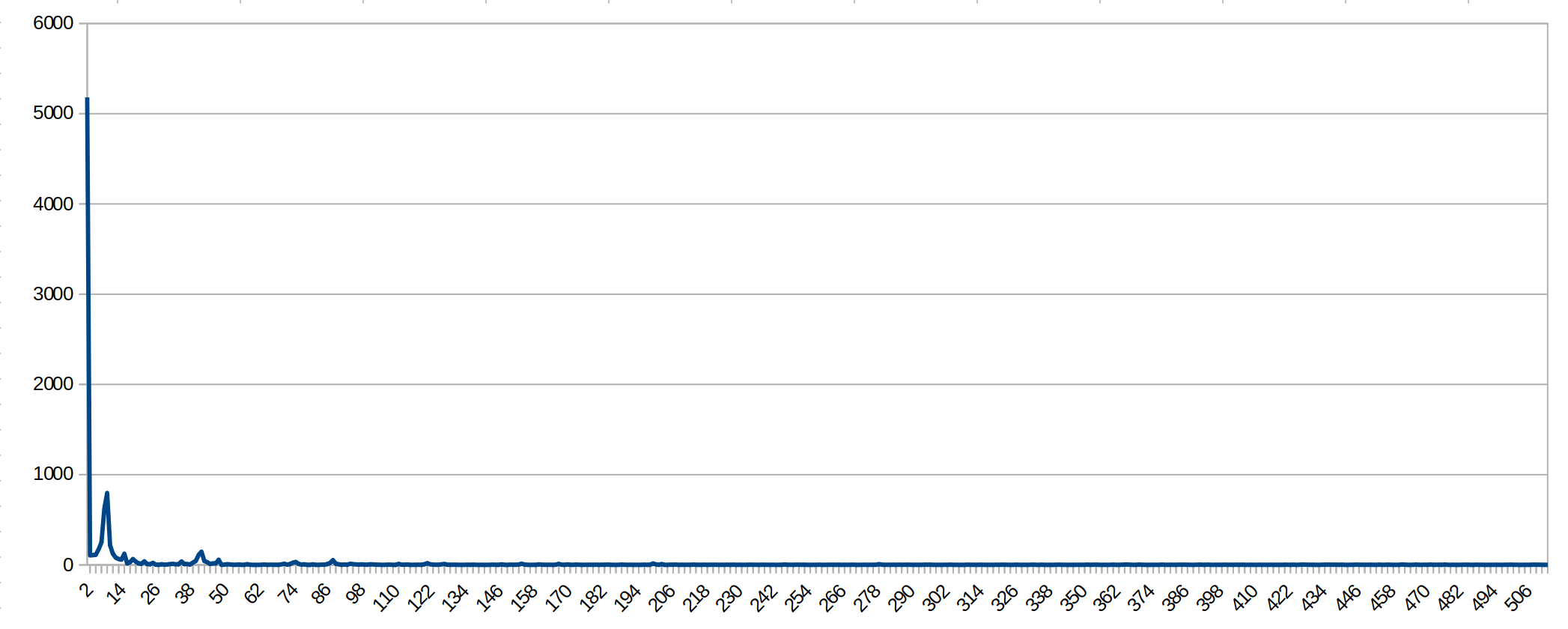
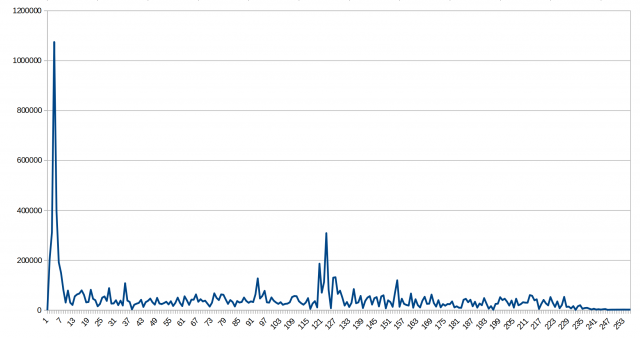
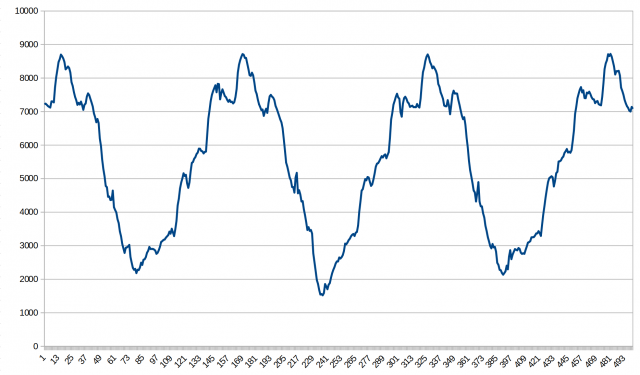
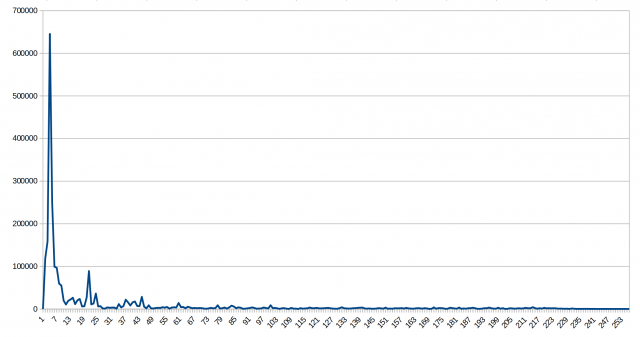
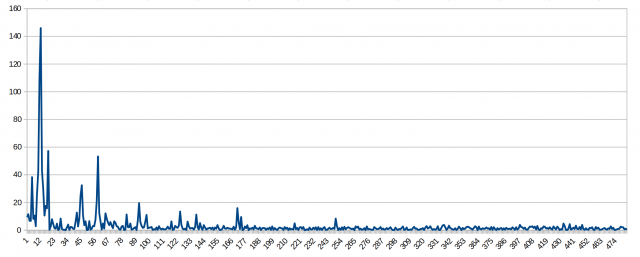
Задача: хочется определять обороты коллекторного двигателя по пульсациям тока, которые вызывает переключение обмоток. И чтобы математика на Cortex M0+ вписывалась в 0.1 сек за итерацию. Искомая частота - 600...6000 герц (450...45000 rpm для 8-полюсного коллекторника бормашинки). Желаемая точность измерений - 1% (относительно измеряемой частоты) В предыдущей теме я спрашивал про рекурсивные фильтры. В общем, полазал по интернетам, решил делать через БПФ, почистил код, и вопросы стали другие. Поэтому новая тема. Что имеем: https://github.com/speedcontrols/dc_sc_grinder/tree/scripts/scripts - исходники, с которыми экспериментирую (в бранчах есть полные дампы). Написал честный FIR-дециматор, и перегнал дампы на 16 килогерц (примерно как в реальном девайсе) Дампы и прочие выклопы нормализовал в целочисленные. Дамп на высоких оборотах Дамп на низких оборотах Спектр на высоких оборотах, 512 точек, обнулена постоянная составляющая (чтобы не портила масштаб). ~ 32 герца на точку. Нужен второй большой пик (который "троится"). ~ 4000 герц, похоже на правду (30000 rpm). Спектр на низких оборотах, 512 точек, обнулена постоянная составляющая. Тоже второй пик, ~ 600 герц (4500 rpm), сходится. С точностью на низах примерно понятно. Если видим что пик внизу - включаем ресамплер, и делаем FFT еще раз. Сетевые пульсации и гармоники в стороне от нужного диапазона - можно спокойно игнорировать. Правда, критично вырастает время выборки. Получается 0.8 сек при точности 1.3%. Терпимо. В крайнем случае похерю точность до 2%, приподняв частоту самплинга. Остались вопросы: Что все-таки смотреть после FFT, реальную часть или корень из суммы квадратов? Просто искать максимум или как-то проверять соседние отсчеты? Как определять "отсутствие" оборотов (или когда ниже допустимых, что актуально для старта). Ведь если PID/ADRC подхватит ложный пик - может не дать разогнаться. Мерить при калибровке амплитуду частоты на низах и ставить порог в половину? Есть ли смысл накладывать перед FFT оконную функцию? Может еще чего-то не знаю и пропустил?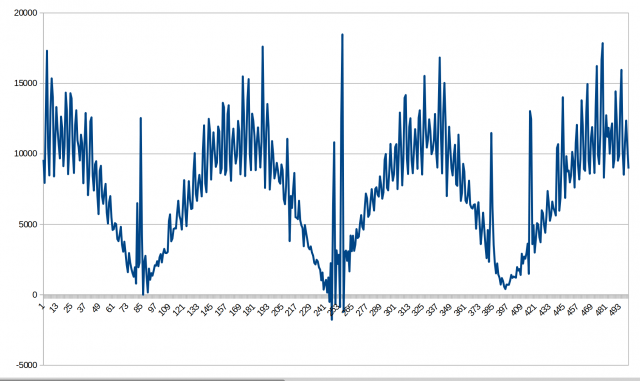
-
Проверьте пожалуйста алгоритмы IIR фильтров
p_v ответил p_v тема в Алгоритмы ЦОС (DSP)
Вот графики из предыдущего поста, но с вырезанными 30 отсчетами в начале (отбрасываем 0-450 герц, чтобы не херили масштаб) hilda_250kHz_rpm_low.txt hilda_250kHz_rpm_high.txt Вроде нужные пики хорошо видны. На втором графике, правда, двоятся, но это не критично. А можно FFT как-то "ступенчато" считать? Сначала 32 точки, чтобы отбросить 0-400 герц и найти диапазон с пиком, а потом уже найденный диапазон просчитать точнее?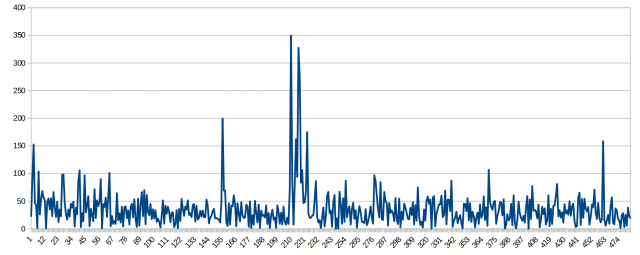
-
Проверьте пожалуйста алгоритмы IIR фильтров
p_v ответил p_v тема в Алгоритмы ЦОС (DSP)
Ну нема в контроллере флоатов, и тем паче даблов. А скриптами я эмулирую то, что потом в контроллере реально повторить. Хм... промахнулсо. Поправлю. Правда я дрюкал дамп _high (максимальные обороты), там ничего не задето. Но для low не прокатит, вы правы. Откачу на 400 герц, чтобы хотя бы первые 3 гармоники прибрать. Максимальная частота тогда получается 4-6 килогерц (30000-45000rpm). И еще, на дампах забыли тахометром обороты померить, так что я не знаю, какие на _low. Знакомый питал хильду с автотрансформатора через выпрямитель. Мог меньше выставить. Я плохо представляю, как сделать высокочастотный ШИМ без выпрямления. А если делать фазовую регулировку симистором, там спектр должен еще сильнее убиваться. Диаграммы снимали, мне с них сигнал совсем не понравился, поэтому даже не стал в репозиторий заливать. Переделал спектрограммы, без фильтрации. 250000/16384 => 15,2588 - шаг в герцах на 1 точку. hilda_250kHz_rpm_low.txt Виден пичок на ~ 600 герцах => 4500 rpm. охоже на правду hilda_250kHz_rpm_high.txt Группа пиков около 3600 Гц (возможно обороты слегка дрожат) => 27000 rpm. Тоже похоже на правду. Еще какой-то паразитный пик на 2800 Гц, фик знает почему. Может обмотки не симметричные. Я могу понять как это даст пики на 1/8 частоты от основной, но не понимаю откуда 3/4 берутся. @Самурай, проверьте, может ваш спектроанализатор хочет в качестве разделителя точку а не запятую. У вас очень странный результат выходит. Хочется определять обороты универсального двигаетеля (в бормашинке) по частоте колебаний тока. Через противо-ЭДС уже сделано, работает приемлимо, но хочется еще лучше. Судя по прикрепленным сонограммам, задача имеет решение. Но надо разобраться, возможно ли оно на чахлом контроллере. Текущая гипотеза - попробовать почистить сигнал и померить период через zero cross.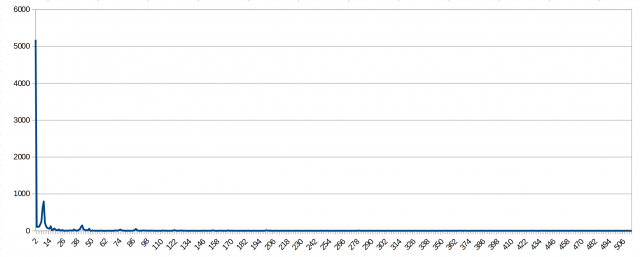
-
Проверьте пожалуйста алгоритмы IIR фильтров
p_v ответил p_v тема в Алгоритмы ЦОС (DSP)
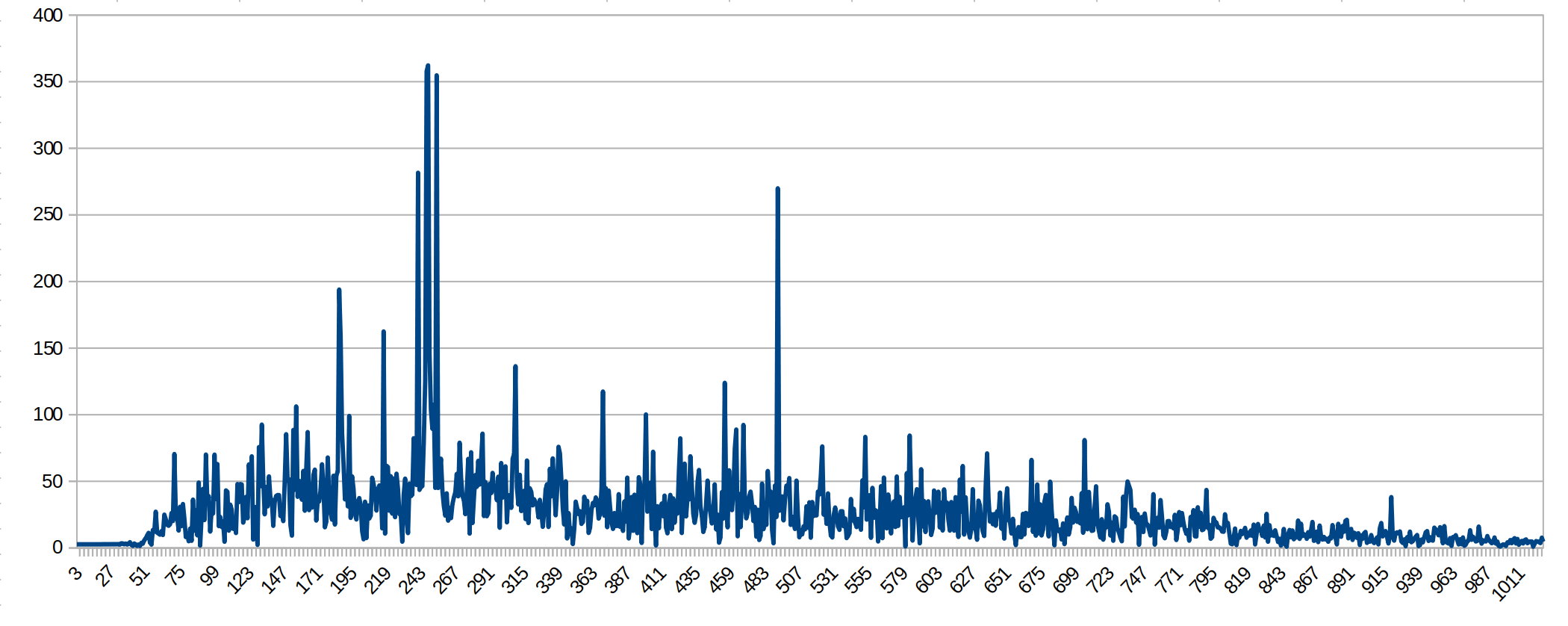
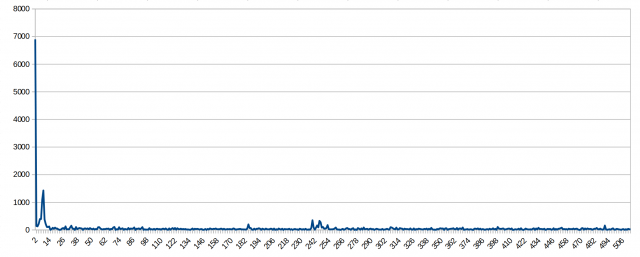
Какая-то у вас ерунда со спектром. Наверное надо все-таки 100 герц и их гармоники сначала обкоцать. Еще в бренче "raw_data" лежат семплы на 250 килогерц. Лучше пока их юзать, чтобы не было всяких левых отражений. 50 килогерц я сделал простым прореживанием, это не совсем корректно. Вроде разобрался с FFT. Выборка 250 килогерц, 16К точек, на графиках первые 1024 точки abs(real) sqrt(real^2 + imaginery^2) Не знаю, по какому правильнее смотреть, вроде по первому? Ну какбэ фундаментальная частота видна довольно четко. Но т.к. полюсов коллектора восемь, они похоже суб-кратными частотами знатно подсирают в нижнем спектре (меньше фундаментальной частоты). Непонятно как это простыми IIR фильтрами надежно обкоцать.