Ekka
-
Постов
191 -
Зарегистрирован
-
Посещение




-
SPI 74HC595 x 2
Ekka опубликовал тема в ARM, 32bit
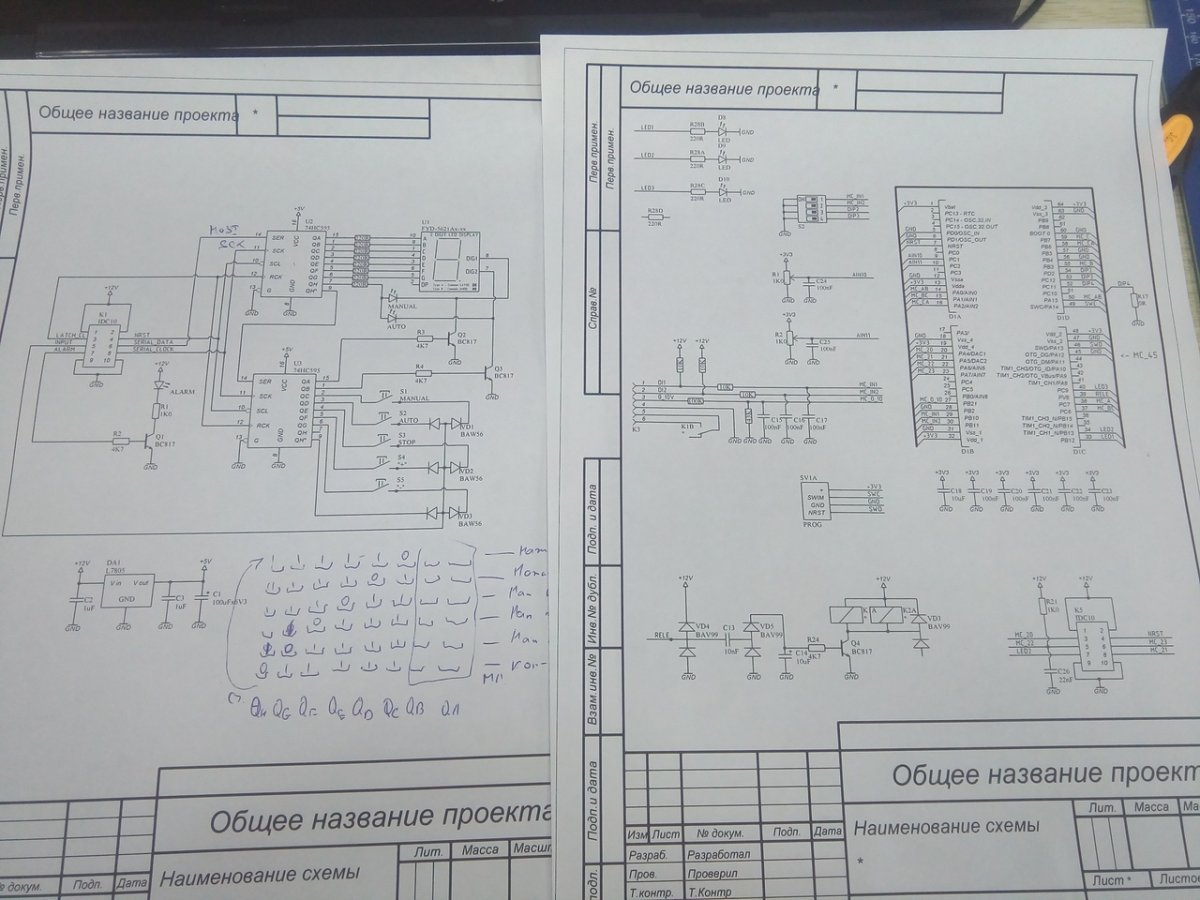
Здравствуйте, возник такой вопрос. У меня соединены две микросхемы 74hc595, первая отвечает за выбор сегментов семисегментного индикатора, вторая - за выбор позиции (DIG1 или DIG2). По идее, нужно отправить по SPI 2 байта. Первый байт - указываем позицию dig (1 или 2), второй байт - сегменты. Передача старшим битом вперед. Не могу понять, как нужно переслать эти два байта. Сначала один байт, потом сразу второй и защелкнуться? Или как-то по-другому? код-говно. Но пока, все, что есть. Глупый вопрос, наверное, но все же. while(1) { CS_SET(); mas[0] = 0x01; mas[1] = 0x07; HAL_SPI_Transmit(&hspi1, mas, 2, 5000); while(HAL_SPI_GetState(&hspi1) != HAL_SPI_STATE_READY); CS_STROB(); HAL_Delay(500); CS_SET(); mas[0] = 0; mas[1] = 0; HAL_SPI_Transmit(&hspi1, mas, 2, 5000); while(HAL_SPI_GetState(&hspi1) != HAL_SPI_STATE_READY); CS_STROB(); HAL_Delay(500); CS_SET(); mas[0] = 0x10; mas[1] = 0x07;; HAL_SPI_Transmit(&hspi1, mas, 2, 5000); while(HAL_SPI_GetState(&hspi1) != HAL_SPI_STATE_READY); CS_STROB(); HAL_Delay(500); }