Bulya
-
Постов
19 -
Зарегистрирован
-
Посещение
Информация о Bulya
-
Звание
Участник
")
- День рождения 23.12.1983
-
Переключатель на полевиках
Bulya ответил Михалыч тема в Силовая Преобразовательная Техника
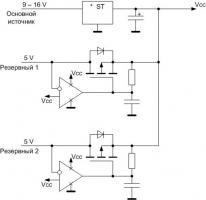
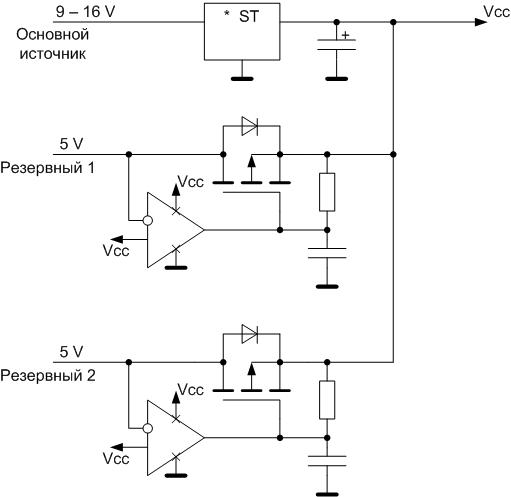
PVI5033 по цене порядка 5 USD дороговато будет Я конечно понимаю, что USB в качестве стабильного источника питания 5-вольтовых устройств не годится, но в штатном режиме работа от него и не предполагается, основная задача USB - запись/чтение конфигурации/логов при обслуживании (там питание 3,3В), но при этом, как минимум, должны работать pull-up 5V и все цепи ввода-вывода. А сброс 5-вольтового контроллера по собственной БОД или от внешнего супервизора можно отследить и впоследствии провести реинициализацию. Зато работа от DC/DC 5V (точность 1%) - штатный режим и сбросов контроллера с требованиями 5% быть не должно. может быть такой вариант? компараторы с открытым коллектором И как будет реагировать линейный стабилизатор при отсутствии напряжения на входе и наличии на вхыходе (насколько я понимаю - ток через него будет небольшим (на его входе мост)) или его тоже нужно отключать?
-
Переключатель на полевиках
Bulya ответил Михалыч тема в Силовая Преобразовательная Техника
Не хочется плодить подобные темы, поэтому возрождаю эту. У меня все та же задача - резервирование питания 5В. Допустимое отклонение 3%, потребляемый ток 100-600мА Хотелось бы узнать работоспособность предложенного варианта транзисторы, например, IRF7316 или подобные в качестве компаратора - что-то вродеLM293 Требуется ли ограничение в цепях компаратора Буду благодарен за отклик.