uni
-
Постов
218 -
Зарегистрирован
-
Посещение
-
Победитель дней
1



-
VS Code + gcc/gdb
uni ответил Шаманъ тема в GNU/OpenSource средства разработки
Вложенная отладка. Отладчик GDB исполняет python-скрипт, который тестирует прошивку, подключённую через J-Link. На картинке - отладка самого python-скрипта во время его работы. Здесь, кстати, есть ошибка в регулярке. Неправильно задана для hex-значения. Разыменование THUMB инструкции тоже неверное (в комментарии). Полезные ссылки: 1. How to attach VSCode debugger to Python application already running in Windows terminal?
-
VS Code + gcc/gdb
uni ответил Шаманъ тема в GNU/OpenSource средства разработки
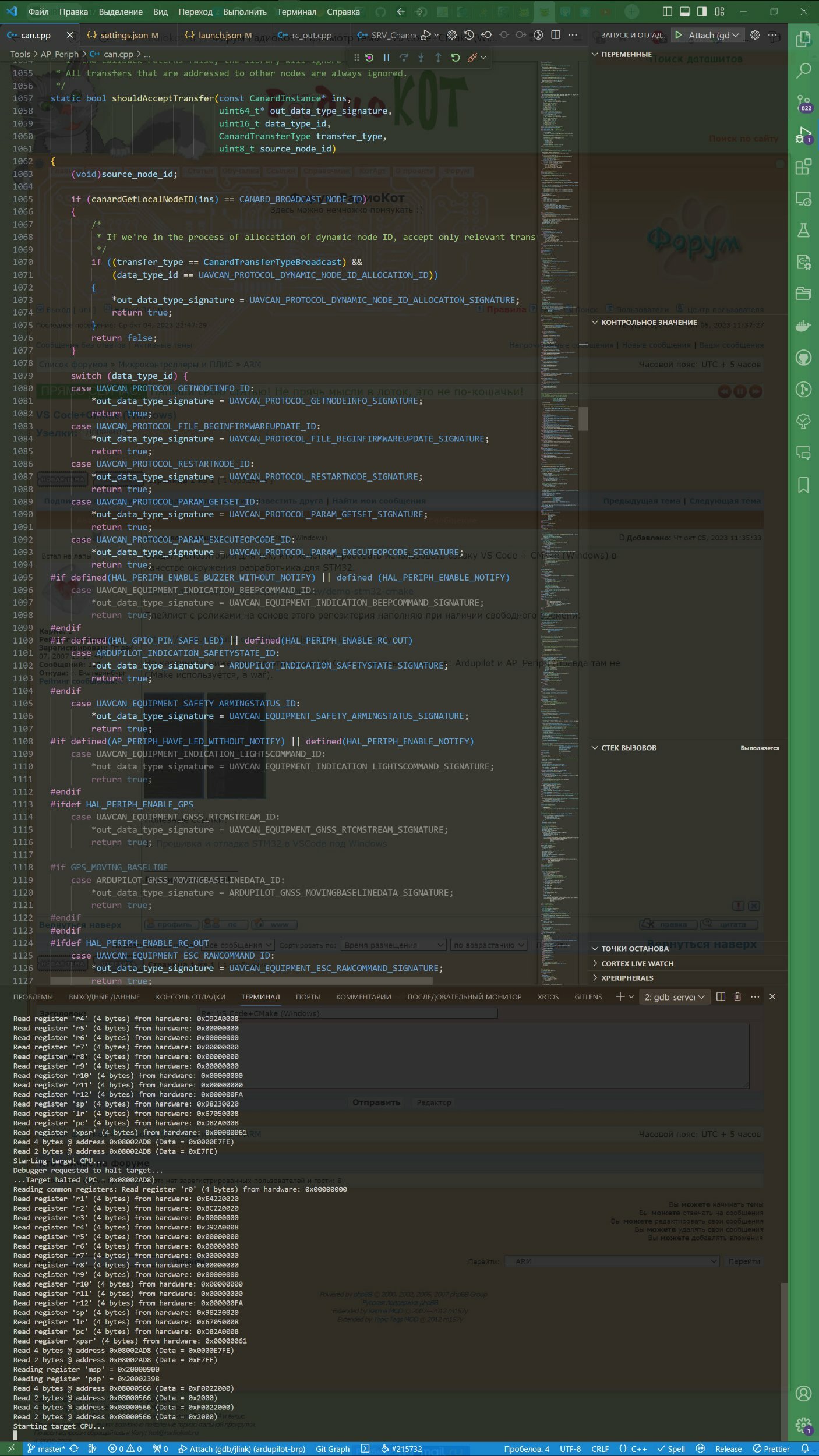
Дизасма я пока не встречал, пока использую самостоятельное формирование lss файла (исходники+асм) и смотрю там, что мне нужно. Остальное есть в таком виде как на картинке. Надо отметить, что сами авторы рекомендуют использовать VS Code как один из вариантов отладки проектов на основе исходников Ardupilot. Правда, они используют другой плагин (cppdbg), а у меня показан cortex-debug. Полезные ссылки: 1. Debugging with GDB using VSCode
-
VS Code + gcc/gdb
uni ответил Шаманъ тема в GNU/OpenSource средства разработки
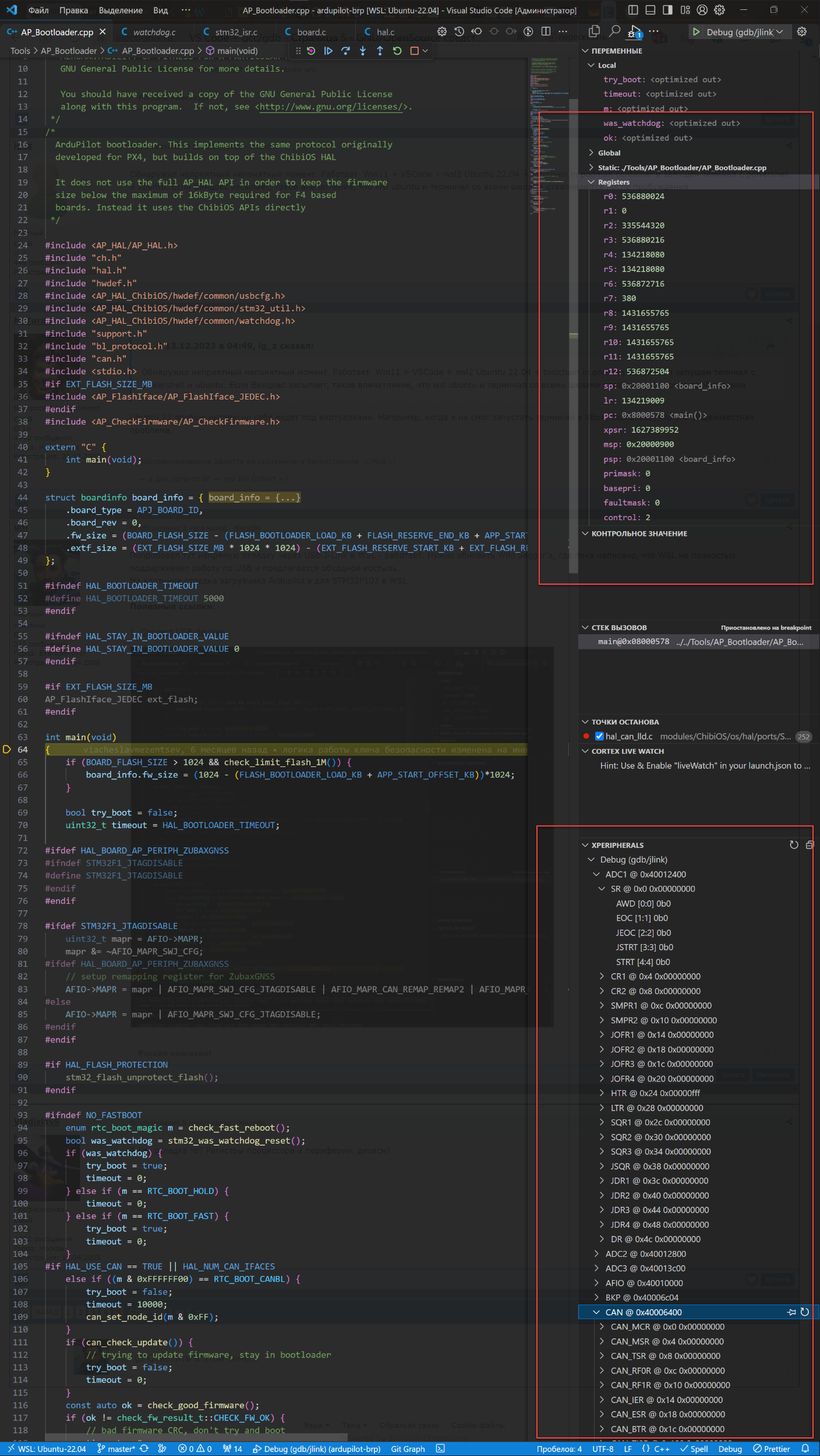
Попробовал тут напрямую отладку через USB J-Link в WSL - работает. Нужно обновить Wiki Segger'а, где пока написано, что WSL не полностью поддерживает работу по USB и предлагается обходной костыль. На картинке отладка загрузчика Ardupilot'а для STM32F103 в WSL. Полезные ссылки: 1. Connect USB devices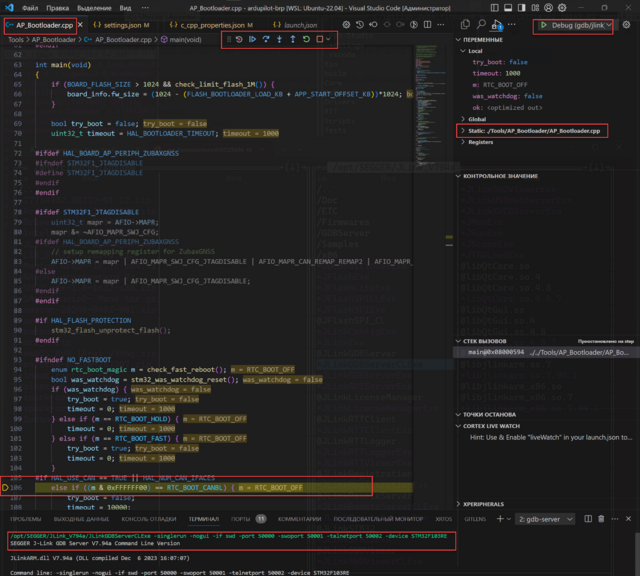
-
VS Code + gcc/gdb
uni ответил Шаманъ тема в GNU/OpenSource средства разработки
Вы додумали за меня, а делать этого не надо. Лучше спросить: а в чём отлаживали omap-l138 конкретно? Я бы написал, что в CCS. И эта тема касается VS Code. Лепить сюда свои домыслы, что бы с ними сражаться - это бессмысленное здесь времяпрепровождение. Я и так знаю как отлаживать код во всех других IDE. Мне это не интересно здесь обсуждать. К примеру, сейчас я отлаживаю связку проектов Ardupilot и AP_Periph. Если вы посмотрите на репозиторий обоих проектов, то не увидите там проектных файлов от какой-либо известной IDE. Вот так осуществляют отладку участники проекта (выложено 4 месяца назад на официальном канале проекта): В прикреплённых файлах - то, как это делаю я, используя VS Code (Windows). Можно использовать Ozone (параллельно всё то же отлаживаю и в Ozone, но не пишу тут об этом), может быть можно как-то Eclipse прикрутить, но об этом можно рассказать в другой теме.