Stolbov
-
Постов
41 -
Зарегистрирован
-
Посещение
Информация о Stolbov
-
Звание
Участник
")
- День рождения 28.06.1992
Посетители профиля
1 074 просмотра профиля


-
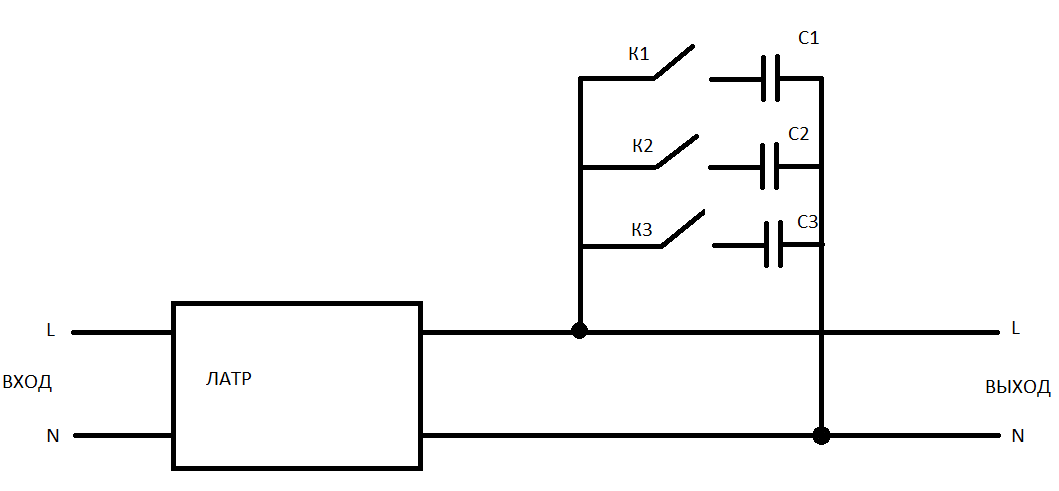
Всем добрый день! Имеется ЛАТР, который выдаёт напряжение от 0 до 250V и ток до 20A. У него имеется система компенсации реактивной мощности, которая состоит из конденсаторов и твердотельных реле (они подключны параллельно нагрузке). Схему прилагаю, но схему управления реле я не рисовал, на них просто через переключатель подаётся +12В. Перед началом работы ЛАТРа, пользователь сначала подключает конденсаторы, а потом включает сам ЛАТР. Но есть нюанс: во время работы автотрансформатор начинает жутко гудеть, но если выключить схему компенсации, всё приходит в норму, и от него не слышно ни единого звука. Стоит подключить конденсаторы - и снова начинается шум. Хотелось бы попросить помощи у знающих людей: 1) Почему автотрансформатор так реагирует на подключённую схему. 2) Можно ли как-нибудь избавиться от этого не очень приятного эффекта? Всем спасибо.
-
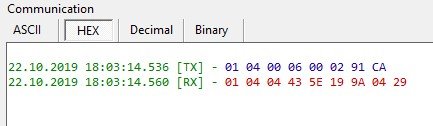
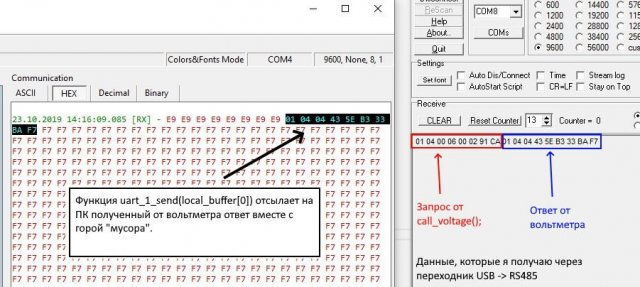
Думаю, стоит рассказать, что у меня получилось. 1) Вольтметр теперь подключен не только к микроконтроллеру через MAX485, но и к компьютеру через переходник USB -> RS485. Таким образом я отслеживаю, что вольтметр получил, и что отдал. 2) Изменил функцию отправки сообщения на вольтметр, хотя в целом принцип там остался тот же, плюс исправил некоторые недочёты, на которые мне указали ранее. 3) Нашёл интересную статью по реализации кольцевого буфера на AVR. Воспользовавшись наработками пользователя, я получил следующий код: #define F_CPU 8000000 //Состояния для автомата функции call_voltage(). #define SEND_ADDR_DEV 1 #define SEND_CODE_FNC 2 #define SEND_ADDR_HGT 3 #define SEND_ADDR_LOW 4 #define SEND_NUMB_HGT 5 #define SEND_NUMB_LOW 6 #define SEND_CRC_HIGH 7 #define SEND_CRC_LOW 8 #define EEPROM_WRITE 9 #define BUFFER_SIZE 18 //Максимальный размер кольцевого буфера (на две принятые посылки) #define BUFFER_MASK (BUFFER_SIZE - 1) //Маска обнуления //Библиотеки #include <avr/io.h> #include <avr/interrupt.h> #include <util/delay.h> #include <avr/eeprom.h> unsigned char buffer_u0[BUFFER_SIZE]; //Массив, выполняющий роль кольцевого буфера unsigned char IndexStart; //Старотовый индекс unsigned char IndexEnd; //Конечный индекс void uart_0_init(); //Инициализация UART0 (MAX485) void uart_1_init(); //Инициализация UART1 для отладки void uart_0_send(uint8_t data); //Отправка байта на вольтметр void uart_1_send(uint8_t data); //Отправка байта на ПК void call_voltage(); //Отправка посылки на вольтметр unsigned char write_byte_in_ring(unsigned char byte); //Функция записи в кольцевой буфер unsigned char index_number(void); //Функция, возвращающая количество непрочитанных байт из буфера unsigned char get_data(void); //Проверка, есть данные в буфере, или нет void read_byte_from_ring(unsigned char *str, unsigned char length); //Чтение ответа из кольцевого буфера в local_buffer int global_state = 0; //Переменная для хранения состояний в call_voltage unsigned char write_byte_in_ring(unsigned char byte) { IndexEnd++; //Инкремент конечного индекса. if(IndexEnd == IndexStart) //Если конечный и стартовый индекс станут равны, то return 1; //прекращаем запись. Нам не нужно, чтобы чтобы новые данные затёрли старые. IndexEnd &= BUFFER_MASK; //Накладываем маску для обнуления, если индекс перевалил за 18. buffer_u0[IndexEnd] = byte; //Записываем байт в массив. return 0; //Возвращаем 0 в знак того, что запись прошла успешно. } unsigned char index_number(void) //Функция возвращает количество непрочитанных данных в буфере { if(IndexEnd >= IndexStart) { return (IndexEnd - IndexStart); //Возвращаем количество свободного места в кольцевом буфере } else { return ((BUFFER_SIZE - IndexStart) + IndexEnd); } } unsigned char get_data(void) { if(IndexEnd != IndexStart) //Если индексы не равны, то return 1; //Вернуть "1" (данные есть) return 0; //Иначе ничего не принято } void read_byte_from_ring(unsigned char *str, unsigned char length) //Чтение пришедших по UART данных из кольцевого буфера в local_buffer. { char i; for(i = 0; i < length; i++) { IndexStart++; IndexStart &= BUFFER_MASK; *str = buffer_u0[IndexStart]; str++; } } void uart_1_send(uint8_t data) { while(!(UCSR1A & (1 << UDRE1))); UDR1 = data; } ISR(USART0_RX_vect) { write_byte_in_ring(UDR0); //Записываем принятые данные в кольцевой буфер } void uart_0_init() { UBRR0H = 0; UBRR0L = 103; //103 - 9600 бод UCSR0B |= (1<<RXCIE0)|(1<<TXCIE0)|(1<<RXEN0)|(1<<TXEN0); //Приём и передача разрешены, прерывания тоже UCSR0C |= (1<<UCSZ00)|(1<<UCSZ01); UCSR0A |= (1<<U2X0); } void uart_1_init() { UBRR1H = 0; UBRR1L = 103; UCSR1B |= (1<<RXCIE1)|(1<<TXCIE1)|(1<<RXEN1)|(1<<TXEN1); UCSR1C |= (1<<UCSZ10)|(1<<UCSZ11); UCSR1A |= (1<<U2X1); } ISR(USART0_TX_vect) { PORTE &= ~(1<<PORTE5); //Настраиваем MAX485 на приём данных } void uart_0_send(uint8_t data) { PORTE |= (1<<PORTE5); //Настраиваем MAX485 на отправку данных UDR0 = data; while(!(UCSR0A & (1 << TXC0))); } void call_voltage() //Отправка сообщения на вольтметр { uint8_t flag = 0x01; int global_state = SEND_ADDR_DEV; while(flag != 0x00) { switch(global_state) { case SEND_ADDR_DEV: uart_0_send(0x01); global_state = SEND_CODE_FNC; break; case SEND_CODE_FNC: uart_0_send(0x04); global_state = SEND_ADDR_HGT; break; case SEND_ADDR_HGT: uart_0_send(0x00); global_state = SEND_ADDR_LOW; break; case SEND_ADDR_LOW: uart_0_send(0x06); global_state = SEND_NUMB_HGT; break; case SEND_NUMB_HGT: uart_0_send(0x00); global_state = SEND_NUMB_LOW; break; case SEND_NUMB_LOW: uart_0_send(0x02); global_state = SEND_CRC_HIGH; break; case SEND_CRC_HIGH: uart_0_send(0x91); global_state = SEND_CRC_LOW; break; case SEND_CRC_LOW: uart_0_send(0xCA); flag = 0x00; break; case EEPROM_WRITE: break; } } } int main(void) { uart_0_init(); //Инициализация UART0 uart_1_init(); //инициализация UART1 sei(); unsigned char local_buffer[9]; //Локальный буфер для хранения принятого пакета DDRE |= (1<<PORTE5); //Управляющий пин настраиваем на выход _delay_ms(1000); call_voltage(); //Отсылаем данные на вольтметр while (1) { if(get_data() == 0) //Если функция вернула 0, значит, в массиве нет новых данных { asm("nop"); //И тогда мы ничего не делаем } else if(get_data() == 1) //Если функция вернула 1, значит, какие-то данные всё же получены { read_byte_from_ring(local_buffer,index_number()); //Читаем полученные от вольтметра данные в local_buffer } else { break; } uart_1_send(local_buffer[0]); //Отсылаем данные из local_buffer на ПК } } Что получилось: 1) После старта МК через UART на ПК лезет мусор, но потом появляется ответ от вольтметра, после чего на ПК отсылается последний принятый байт от вольтметра (это уже недостаток моего кода). 2) Через переходник USB -> RS485 я вижу тот же самый ответ, который я получил от вольтметра при помощи МК. Что вызвало вопросы: 1) Я полагал, что функция read_byte_from_ring полностью заполнит local_buffer, но не уверен, что это происходит, так как на пк отсылается только первый элемент массива - local_buffer[0], и, не смотря на это, на ПК я вижу полный полученный от вольтметра пакет. Может быть, я просто ещё не до конца понимаю, как это работает. 2) Попытка изменить программу таким образом, чтобы на ПК отсылалась полученная от вольтметра посылка каждые пять секунд, успехом не увенчалась. Когда я помещаю в супер-цикл функцию call_voltage, в своём ипровизированном отладчике я вижу, что микроконтроллер отправил только самый первый байт запроса: "0x01". Больше не происходит ничего. Буду рад получать идеи и замечания. Я уверен, что цель уже совсем близко. Результаты опыта на скриншоте:
-
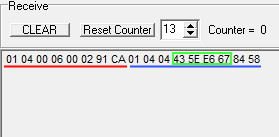
Доброе утро! Возможно, это очень "профановское" отношение, но мне показалось, что до первой записи в eeprom мк успеет принять байты по прерыванию и записать их в массив. Возможно, мне просто надо было сделать проверку переменной counter. Если она равна 9 (количество байт в ожидаемой посылке), то тогда можно смело писать данные в память. Здесь мне надо было написать более подробно. Извините. Прекрасно понимаю, что телепатии не существует) Вообщем, если передачу пакета оформить вот так: //... uint8_t databuffer[8] = {0x01,0x04,0x00,0x06,0x00,0x02,0x91,0xCA}; int i = 0; while(i < 8) { uart_0_send(databuffer[i]); i++; } //... То пакет не будет отправлен, либо будет отправлен только первый байт. В чём причина этого, мне не известно. Попробую сделать так, как вы сказали. И да, конкретно в моём вольтметре нужно было настроить параметры передачи данных (количество байт данных, стоповых бит, скорость), что я и сделал. P.S. Подключил, всё получилось. Красной линией отмечена моя посылка (прочитать регистры 6 и 7), а синей - ответ от прибора. Зелёным прямоугольником отметил текущее напряжение в формате float.
-
О, с этим проблем нету. Модель вольтметра: PD194UI-9K4T. Я подключал его через переходник к ПК, и опрашивал его при помощи его фирменной программы. Так же я его опрашивал при помощи терминала: