D_K_
-
Постов
10 -
Зарегистрирован
-
Посещение
-
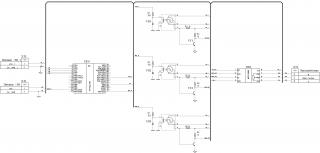
Взаимодействие оптрон H11L1- цифровой резистор MCP41010
D_K_ опубликовал тема в Схемотехника
Здравствуйте. Требуется построить некое устройство, в котором цифровой резистор с SPI – управлением (MCP41010) должен быть гальванически развязан по отношению к цифровой системе управления (МК ATMega 48PA). Не мудрствуя лукаво, пытался это сделать с помощью трёх оптопар (H11L1) по каждому цифровому сигнальному каналу управления (выбор кристалла CS, тактовый сигнал SCK, канал передачи данных MOSI). Скорость передачи по SPI _ каналу – 19200 бит/с. Столь быстрая оптопара избыточна в этом случае, но такой выбор даёт уверенность в правильной передаче сигналов управления без искажения фронтов. Выходной электрод оптопары H11L1 – открытый коллектор, подтянул его резистором 1k к VCC. Конечно, при таком подключении все управляющие сигналы будут инвертированы. Для исключения инверсии к выходу оптрона подключил базу n-p-n транзистора (BC817), эмиттер которого посадил на землю, а коллектор подтянул резистором 1k к VCC. Собранный таким образом инвертор на транзисторе, превращает инвертированный оптопарой сигнал в неинвертированный (по отношению ко входу). Питание обоих частей оптопары – от двух разных 5-ти вольтовых источников. Ток светодиода ограничил резистором 2k2. Но не судьба…. Для выяснения причины, подключил управляющие сигналы МК минуя опторазвязку непосредственно к ногам цифрового потенциометра – всё работает. Вторым шагом убедился в работоспособности оптопары. Для этого отнял все управляющие провода от МК и гибким проводником коммутировал на вход каждой оптопары напряжение питания – состояние выхода всякий раз изменяется. Погуглив на предмет схемы включения H11L1 нашёл следующую статью http://kit-e.ru/articles/interface/2006_5_84.php. Её автор рекомендует антипараллельно входному светодиоду применять диод Шоттки. Применил диод 10BQ060 – результат тот же…. Может быть, кто-то делал нечто подобное? В чём моя ошибка? 1.sch Спасибо за интерес к моей проблеме.