


Dima_Ag
-
Постов
156 -
Зарегистрирован
-
Посещение
-
Победитель дней
1
Информация о Dima_Ag
-
Звание
Частый гость
")
Посетители профиля
3 092 просмотра профиля
-
Расчет фазового регулятора мощности
Dima_Ag ответил zheka тема в Математика и Физика
Эта задача имеет много решений. Например, такое - полиномиальная аппроксимация. http://otvety.google.ru/otvety/thread?tid=2049ab548f916629 вот, к примеру, полином 4 порядка, аппроксимирующий исходную функцию. Зелёный график - исходная функция, а красный - функция аппроксимирующего полинома. При этом, естественно, возникает ошибка, но если Вам это не очень критично - то можете использовать этот метод.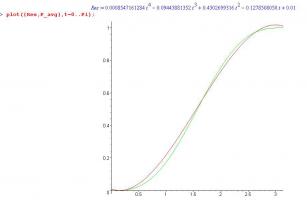
-
Расчет фазового регулятора мощности
Dima_Ag ответил zheka тема в Математика и Физика
Да! Pi - это половина периода функции sin(x), где аргумент функции задаётся в радианах. P.S. Согласен с определением для t в моей формуле, данным Татьяной. Оно более точное.
-
Расчет фазового регулятора мощности
Dima_Ag ответил zheka тема в Математика и Физика
Решение Вашей задачи выглядит так: (см. рисунок в аттаче). Эта формула позволяет рассчитать мощность при известном значении времени задержки открытия тиристора. Время = 0 - тиристор вообще не открывается. Время = Pi - тиристор открыт сразу, с момента начала полупериода. Если интересно, как получить это решение - пишите!

-
Нет, у меня датчик другого типа, не такой, как у Вас на рисунке. Понятно, что измеряемая сила должна прилагаться сверху, или снизу широкой стороны сенсора. Но вот в чём вопрос - какова должна быть площадь контакта для правильной работы датчика ? Или, возможно, есть какие-то специальные требования к форме той части, которая давит на датчик?

-
Давайте заново, с правильными обозначениями. На приведённой схеме L1 - взаимная индуктивность. L2 + L1 = Индуктивность 1 обмотки L3 + L1 = Индуктивность 2 обмотки

-
Давайте разберёмся с уравнениями. На рис. изображена часть Т образной схемы замещения (для работы трансформатора на холостом ходу этого достаточно). Запишем входное сопротивление (в операторной форме): Zin = R1 + p*L1 + p*L2; Если индуктивность L1 имеет знак минус, то Zin = R1 - p*L1 + p*L2 = R1 - p(L2 - L1) Таким образом, наличие отрицательной индуктивности приводит к "уменьшению" индуктивного сопротивления у последовательно соединённых катушек. При этом через L2 будет протекать бОльший ток, чем был бы при отсутстии отрицательной индуктивности L1 . ОТсюда и эффект "повышения" напряжения".





