MPetrovich
-
Постов
796 -
Зарегистрирован
-
Посещение
Информация о MPetrovich
-
Звание
Знающий
")
Посетители профиля
2 773 просмотра профиля


-
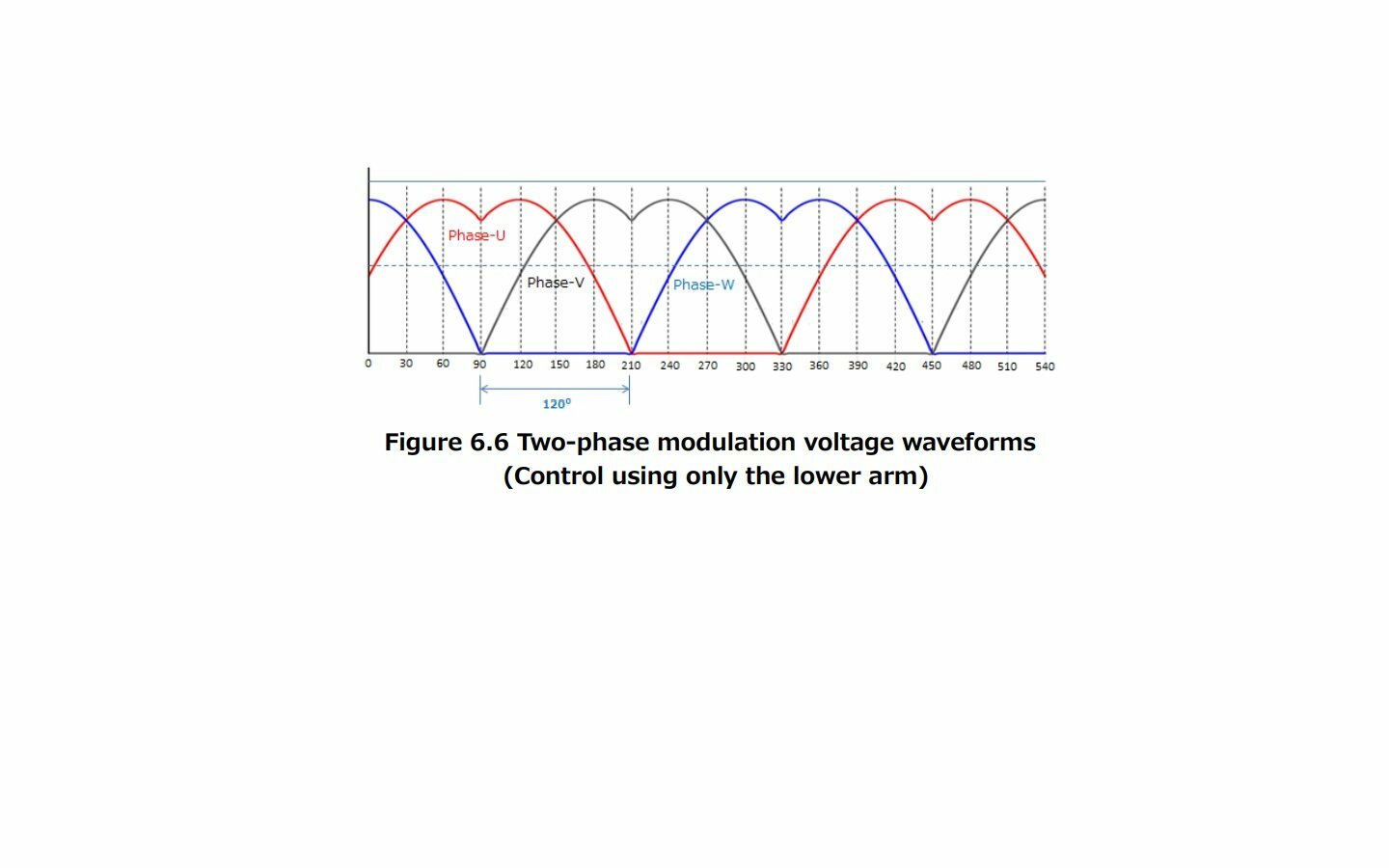
Будет ли вектрным управление согласно изображения выше, если принять за проекции этого вектора на оси моментальные значения напряжений на фазах? Поскольку в течении 120 градусов одна из фаз равна нулю, то оперировать придётся всего с двумя значениями вместо трёх. Это значительно упростит всё преобразования Кларка/Парка. Единственной затыкой остаётся измеритель оборотов... Я пока так и не придумал каким образом его реализовать. Да, ещё забыл уточнить- нужны датчики тока на всех 3-х фазах или достаточно одного общего?
-
Так вроде всё так и поступают))) Настраивают ШИМ-формирователи контроллера на выдачу трёх синхронных ШИМ, а потом только меняют к-т заполнения. Не понял что такое двухфазный вектор... Я полагаю это метод управления двигателем по двум фазам, в то время, как третья на земле (нижний ключ фазы открыт). Я таким пользуюсь, но в скалярном режиме.