arhiv6
-
Постов
1 020 -
Зарегистрирован
-
Посещение
3 Подписчика

Информация о arhiv6
-
Звание
Профессионал
")
Посетители профиля
15 612 просмотра профиля



-
Кажется, у некоторых пользователей звание теперь дублируется. Так и должно быть?


-
Чтобы снимать с солнечной батареи энергию эффективно, не достаточно просто подключить к ней напрямую нагрузку или аккумулятор. Ключевая фраза для поиска "MPPT контроллер". У TI есть готовые микросхемы, которые сочетают в себе как MPPT контроллер, так и контроллер для заряда буферного аккумулятора на одну или несколько ячеек. Вот список, выбирайте подходящий под свои требования (тип аккумулятора, количество ячеек, мощность нагрузки, напряжение солнечной батареи).
-
LNA 10GHz
arhiv6 ответил oleg-n тема в RF & Microwave Design
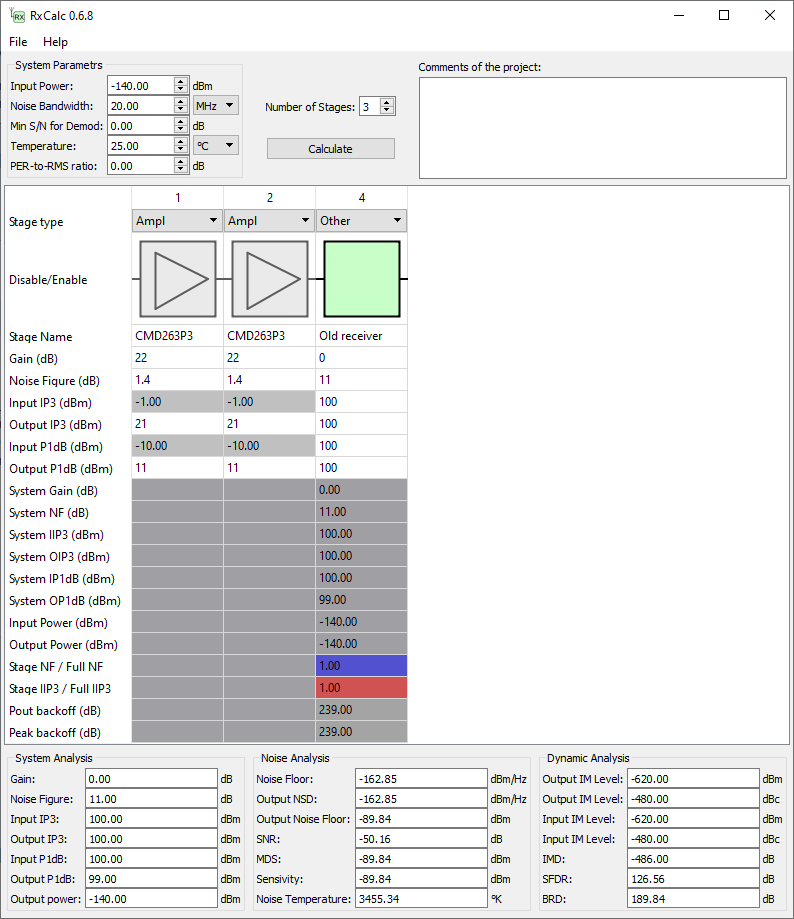
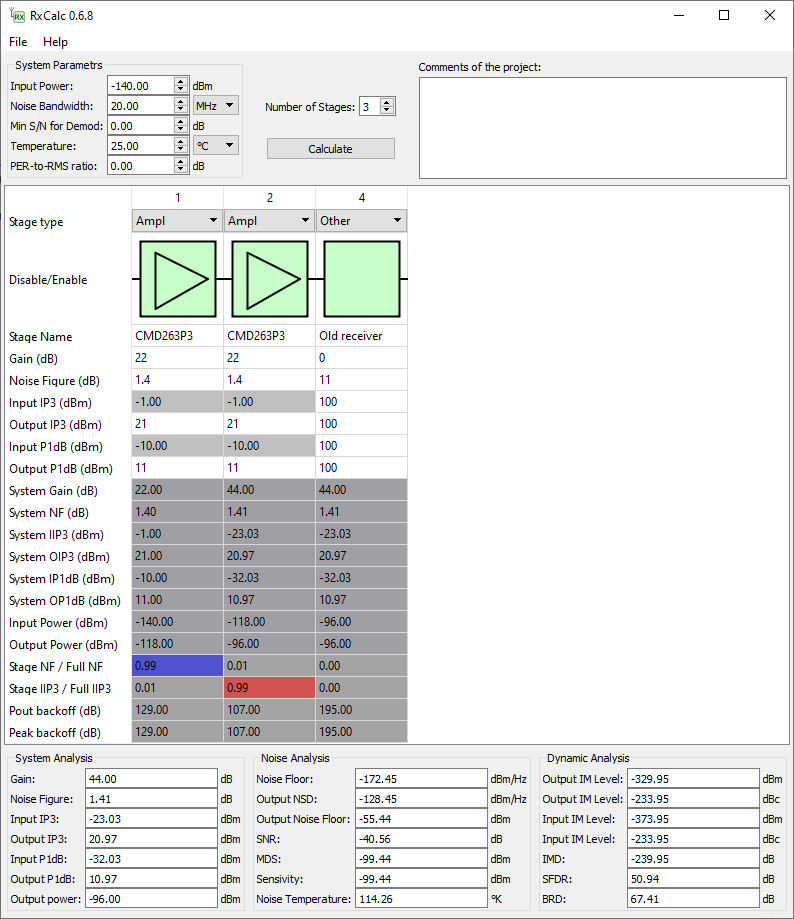
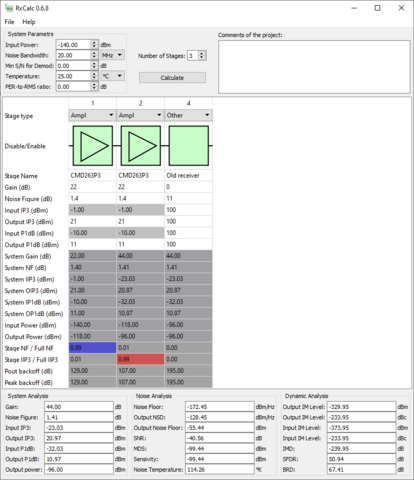
Но это не значит, что добавлением МШУ с усилением 50дБ получится изменить чувствительность с -90дБм до -140дБм. Давайте попробуем посмотреть, как изменится чувствительность приёмника при добавлении двух CMD263P3. Т.к. входных данных слишком мало (не хватает значения ширины полосы приёма (демодуляции) и текущего значения Кш приёмника), попробую поугадывать. Текущая чувствительность -90дБм реализуема при следующих возможных вариантах ПП/Кш: 200МГц/1дБ, 20МГц/11дБ, 2МГц/21дБ, 200кГц/31дБ, 20кГц/41дБ, 2кГц/51дБ, 200Гц/61дБ и т.д. Для первого варианта добавлять МШУ бессмысленно, Кш приёмника только ухудшится (станет 1.41дБ). Для второго варианта и далее чувствительность станет соответственно: -99.44дБм, -109.42дБм, -119.28дБм, -128.09дБм, -132.79дБм, -133.73дБм. Если дальше так же продолжать, всё равно упрётесь примерно в -134дБм, ниже с такими МШУ никак не получить. Вот, я для себя когда-то калькулятор писал https://sourceforge.net/projects/rxcalc/files/RxCalc-0.6.8_installer.exe/download Он помогает оценить динамику, чувствительность приёмника и т.д. Попробуйте сами в нём свой тракт собрать. Вот пример расчёта для варианта 20МГц/11дБ: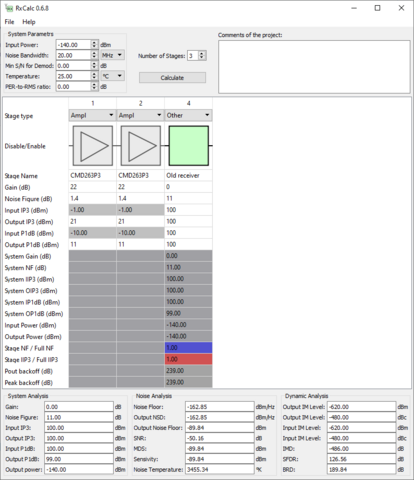
-
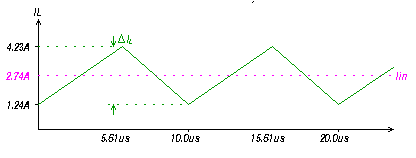
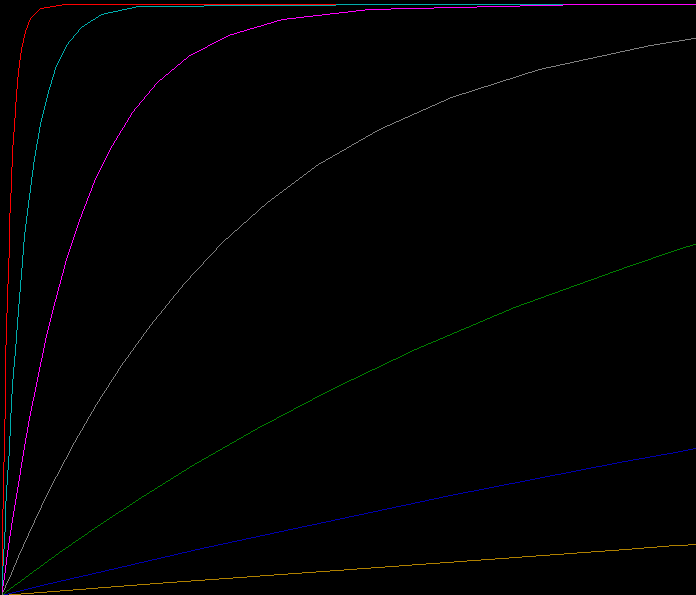
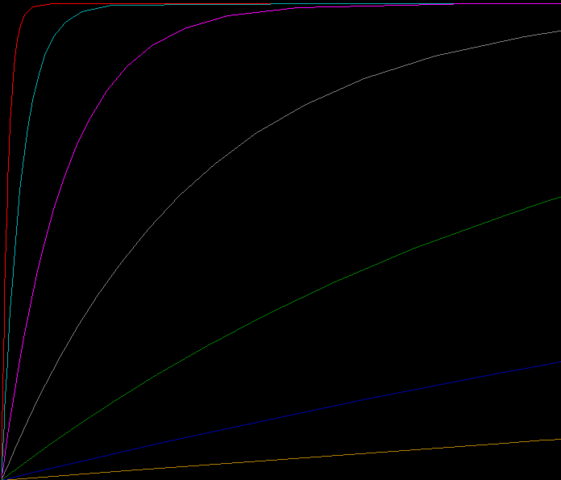
В симуляторе все элементы идеальные. А для идеальной цепи, состоящей только из индуктивности и источника напряжения ток в ней возрастает линейно. Т.е. там и правда будет идеальная пила. В реальном DCDC предполагается, что активное сопротивления источника напряжения, ключей и самой индуктивности сильно меньше реактивного сопротивления индуктивности на частоте переключения. Грубо говоря: за время открытия ключей ток через индуктивность успевает подняться только до единиц ампер, хотя на постоянном токе он бы составил десятки-сотни ампер. Т.е. видно только начальный участок экспоненты, а визуально он близок к линейному. Вот пример, здесь синий и желтый графики - тоже экспоненты, но видно только их начальные участки: Поэтому если в реальном источнике смотреть ток осциллографом то тоже будет видно пилу. Разумеется она не идеальна, но глазом этого видно не будет.
-
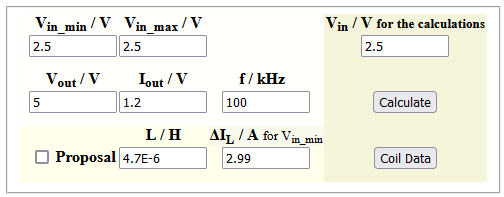
Те же параметры, что на скриншоте, только индуктивность 4.7e-6. А, понял. Опечатлся, получается 4.23A вместо 4.32A.