В продолжение данной темы http://electronix.ru/forum/index.php?showtopic=87118
Ее почему-то посчитали беспредметной и недостойной разработчиков, а жаль.
Пришлось делать самому, хотя такие "профессионалы" уж сильно зажрались и правда не достойны данной темы... за одну только прошивку просили 60к - смешно!
Такое ощущение, что они действительно разрабатывают только космические корабли для забора лунного грунта. И на такие смешные проекты у них нет времени.
А по делу - вот что получилось
http://www.youtube.com/watch?v=hNJiYKdNguY
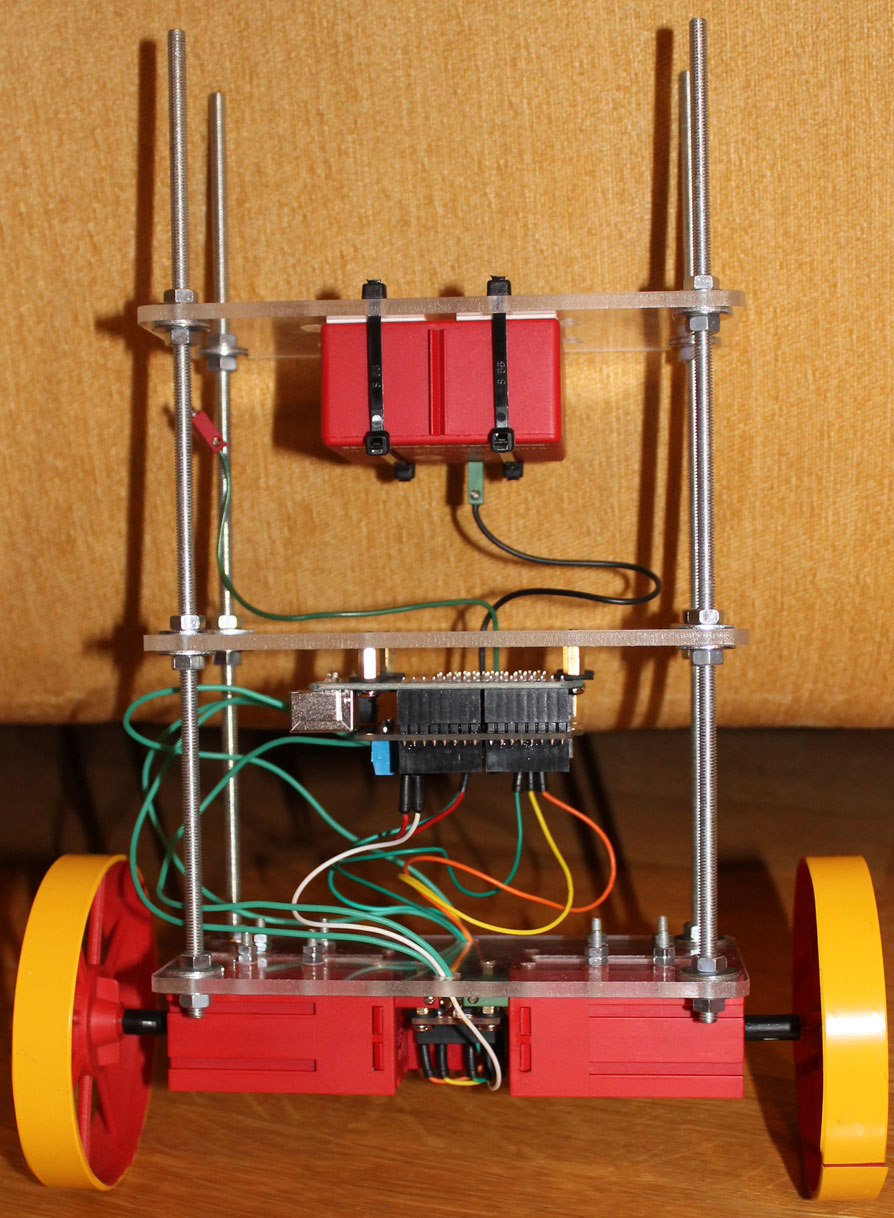
За основу была взята Arduino Uno + Motor Shield 2A от DFRobot
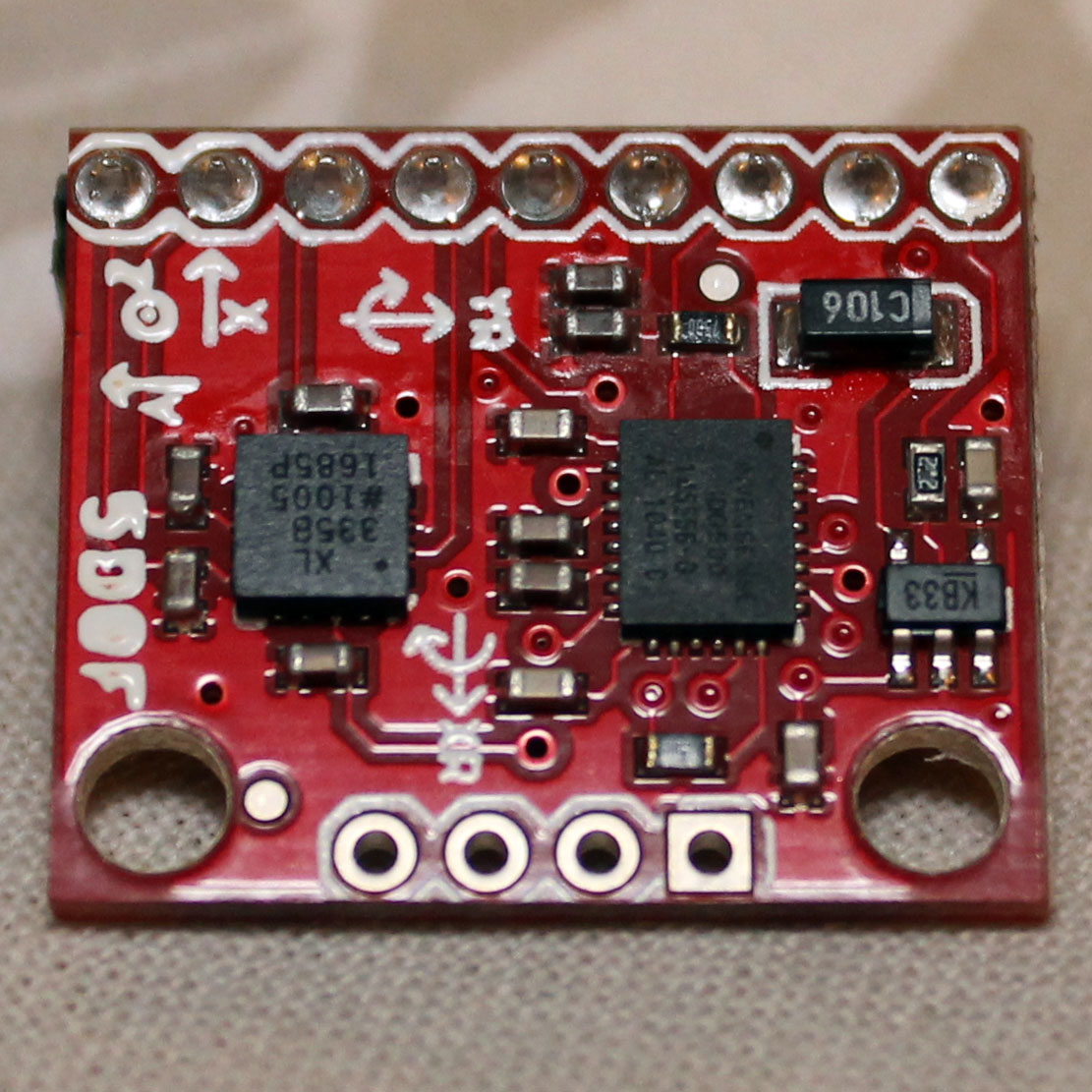
Модуль IMU с аналоговыми датчиками - 2х осевой гироскоп IDG500 и 3х осевой акселерометр ADXL335
Заказывал модуль из Америки со sparkfun'а - доставка FedEx'ом шла 4 дня до Московской области. Стоимость доставки не маленькая - 1200 руб., но зато быстро.
Моторы 9V, 150-200 об\мин под нагрузкой, до 300 об\мин без нагрузки.
Аккумуляторная батарея - 8.4V 1500mAh
Рама - оргстекло + штанга с резьбой М5 метровая... была распилена на 4 части.
Оргстекло вырезалось и сверлилось на фрезерном станке.