Поиск
Показаны результаты для тегов 'sdc'.
-
Ограничения Multi cycle
Tik31 опубликовал тема в Языки проектирования на ПЛИС (FPGA)
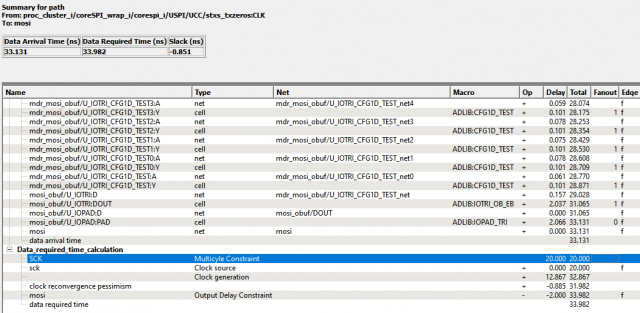
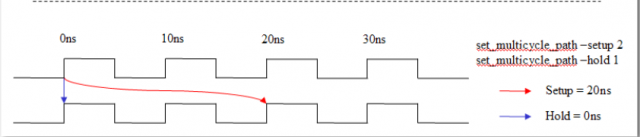
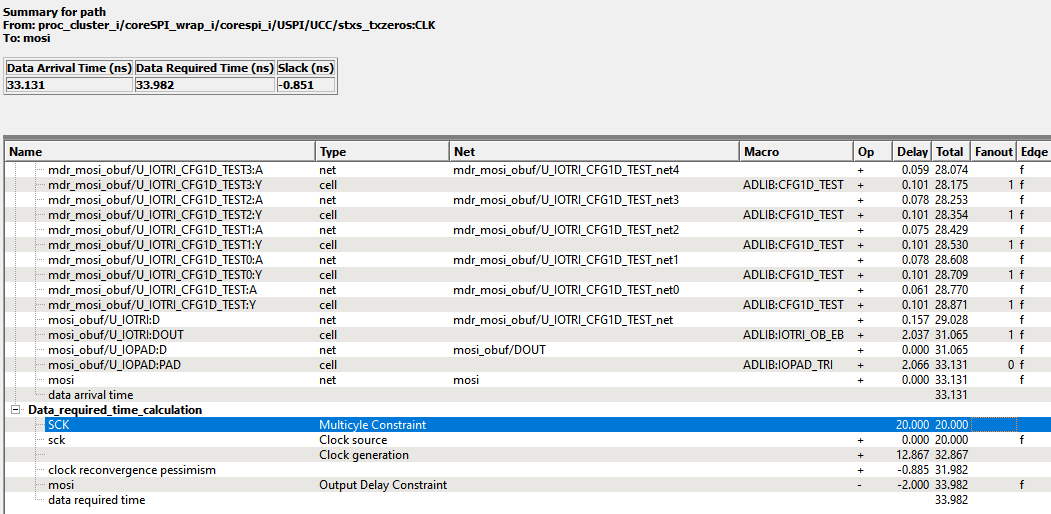
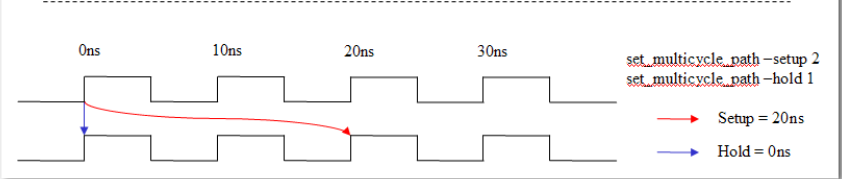
Здравствуйте! Продолжаю разбираться с написанием констрейнтов для текущего проекта (Polarfire Microchip). В этот раз проблема связана с ограничениями для SPI ядра (частота шины - 50 МГц, SPI - 25 МГц). Мною (на основе примера) был подготовлен следующий файл с ограничениями. ################################################################# # Определение частоты ################################################################## # Частота системной шины - 50 МГц. Максимальная частота SPI - 25 МГц set clkSysPeriod 20 set clkSpiPeriod 40 create_generated_clock -name SCK \ -divide_by 2 \ -source [get_pins proc_cluster_i/coreSPI_wrap_i/corespi_i/USPI/UCC/spi_clk_out/CLK] \ [get_ports sck] ################################################################# # Задание входных и выходных задержек ################################################################# set trace_delay_clock 0 set trace_delay_mosi 0 set trace_delay_miso 0 set trace_delay_ss 0 set mosi_setup 2.0 set mosi_hold 2.0 set ss_setup 3.0 set ss_hold 3.0 set mosi_max_delay [expr {$trace_delay_mosi + $mosi_setup - $trace_delay_clock}] set mosi_min_delay [expr {$trace_delay_mosi - $mosi_hold - $trace_delay_clock}] set ss_max_delay [expr {$trace_delay_ss + $ss_setup - $trace_delay_clock}] set ss_min_delay [expr {$trace_delay_ss - $ss_hold - $trace_delay_clock}] # Задание Tco для MISO (см. datasheet) set Tco_Max 8.0 set Tco_Min 0.0 set miso_max_delay [expr $Tco_Max + $trace_delay_clock + $trace_delay_miso] set miso_min_delay [expr $Tco_Min + $trace_delay_clock + $trace_delay_miso] # Данные из FPGA изменяются по заднему фронту частоты SCK и защелкиваются по переднему во Flash set_output_delay -clock [get_clocks {SCK}] -clock_fall -max $mosi_max_delay [get_ports {mosi}] set_output_delay -clock [get_clocks {SCK}] -clock_fall -min $mosi_min_delay [get_ports {mosi}] set_output_delay -clock [get_clocks {SCK}] -clock_fall -max $ss_max_delay [get_ports {ss}] set_output_delay -clock [get_clocks {SCK}] -clock_fall -min $ss_min_delay [get_ports {ss}] # Данные из Flash изменяются по заднему фронту частоты SCK и защелкиваются по переднему в FPGA set_input_delay -clock [get_clocks {SCK}] -clock_fall -max $miso_max_delay [get_ports {miso}] set_input_delay -clock [get_clocks {SCK}] -clock_fall -min $miso_min_delay [get_ports {miso}] ################################################################# # Multi-Cycle ################################################################# set multiCycleCount [expr {int(ceil($clkSpiPeriod/$clkSysPeriod))}] set_multicycle_path -setup $multiCycleCount \ -to [get_ports {mosi}] set_multicycle_path -hold [expr {$multiCycleCount - 1}] \ -to [get_ports {mosi}] set_multicycle_path -setup $multiCycleCount \ -to [get_ports {ss}] set_multicycle_path -hold [expr {$multiCycleCount - 1}] \ -to [get_ports {ss}] set_multicycle_path -setup $multiCycleCount \ -through [get_ports {miso}] \ -to [get_clocks {clk50}] set_multicycle_path -hold [expr {$multiCycleCount - 1}] \ -through [get_ports {miso}] \ -to [get_clocks {clk50}] Системная частота задается в другом файле и имеет вид: # Входная тактовая частота create_clock -name {clk} -period 20 -waveform {0 10 } [ get_ports { clk } ] # Входная частота JTAG create_clock -name {tck} -period 166.67 -waveform {0 83.33 } [ get_ports { tck } ] # Частоты SYS_PLL create_generated_clock -name {clk125} -multiply_by 5 -divide_by 2 -source [ get_pins { pll_0/PF_CCC_C0_0/pll_inst_0/REF_CLK_0 } ] -phase 0 [ get_pins { pll_0/PF_CCC_C0_0/pll_inst_0/OUT1} ] create_generated_clock -name {clk50} -multiply_by 1 -divide_by 1 -source [ get_pins { pll_0/PF_CCC_C0_0/pll_inst_0/REF_CLK_0 } ] -phase 0 [ get_pins { pll_0/PF_CCC_C0_0/pll_inst_0/OUT2} ] После P&R и Timing Verify я получил нарушение по Hold В данном очтете мне не понятно откуда берется +20 нс (Multicycle), если я задал: set_multicycle_path -hold [expr {$multiCycleCount - 1}] \ -to [get_ports {mosi}] Libero корректно воспринял конструкции как -setup 2 -hold 1. Ориентировался я на картинку ниже