
Поиск
Показаны результаты для тегов 'интерфейсы'.
-
Фазовращатель PE44820
Flip-fl0p опубликовал тема в Компоненты
Здравствуйте уважаемые участники форума. Возникла необходимость управлять фазовращателем PE44820. Читаю на него документацию и никак не могу понять назначение вывода OPT. У кого был опыт работы с подобными фазовращателями поделитесь знанием пожалуйста. pe44820ds.pdf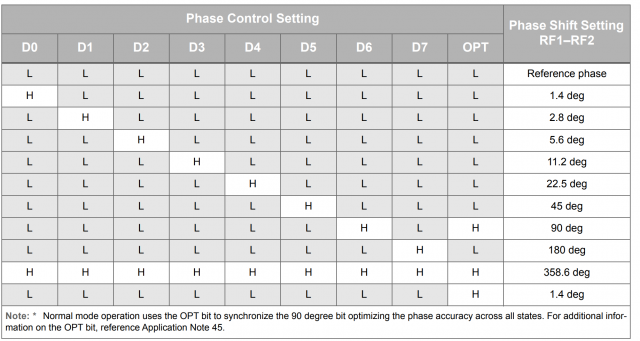
-
stm32g4 STM32G4. Интерфейсы и их возможности
КОМПЭЛ опубликовал тема в Объявления пользователей
Цикл статей о новом семействе микроконтроллеров STM32G4 производства компании STMicroelectronics продолжает обзор интерфейсных модулей этих микроконтроллеров. В статье рассматриваются следующие разделы: Quad-SPI Контроллер внешней памяти FMC Универсальный синхронный/асинхронный приемопередатчик USART Малопотребляющий приемопередатчик LPUART Последовательный интерфейс SPI Интерфейс I2C (Inter-Integrated Circuit) ИК-интерфейс IRTIM USB 2.0 FS USB Type-C Power Delivery (UCPD) CAN FD Аудиоинтерфейс SAI Читать статью >>
