Поиск
Показаны результаты для тегов 'драйвер'.
-
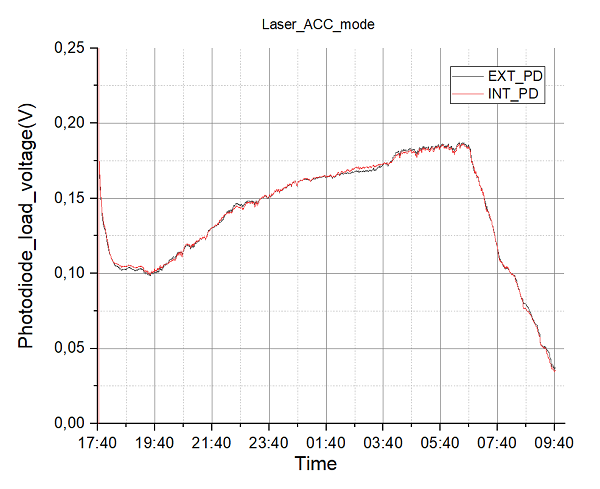
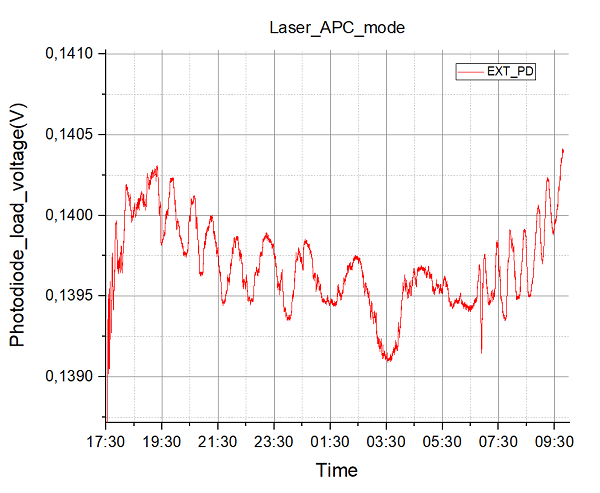
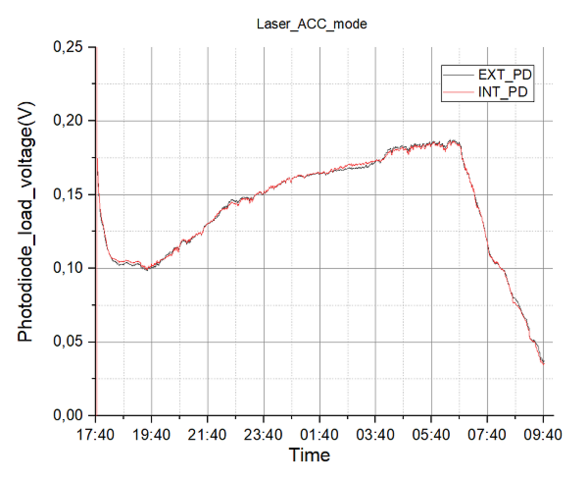
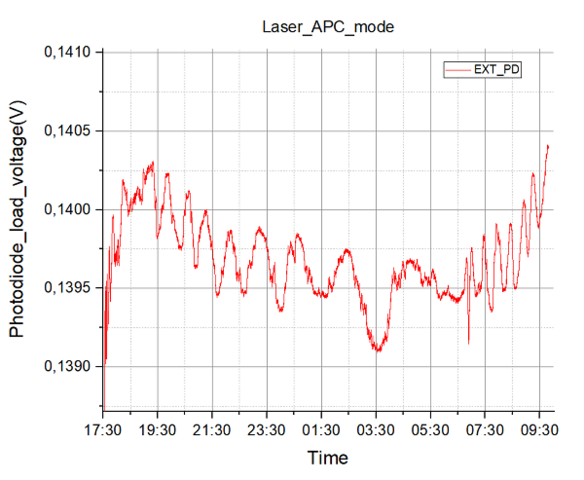
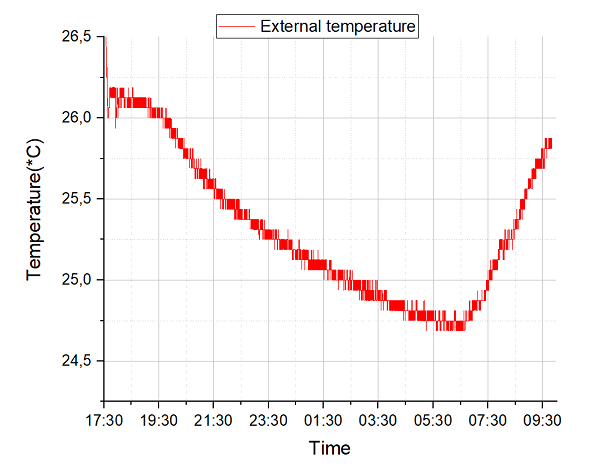
Имеется лазер с оптоволоконным выходом - Thorlabs S1FC635, внутри одномодовый ЛД и драйвер с БП. Измеряется дневная стабильность мощности излучения, установка простая - излучение с волоконного разъема лазера попадает в коллиматор, далее на внешний ФД(S12915-1010R). Сигнал снимается с нагрузки ФД через 24-битную DAQ-систему. Вся установка на оптическом столе, мощность лазера установлена ~1мВт. Получено некоторое количество измерений, главный вопрос - причина(ы) колебаний мощности лазера в APC-режиме в низкочастотном диапазоне около 0,277...0,555 мГц?(см.графики) Что было проверено: 1)В ACC-режиме сигналы от внешнего ФД и внутреннего ФД (который внутри ЛД) практически одинаковы, думаю, что параметры внутреннего ФД не должны изменяться под воздействием самонагрева ЛД (1 мВт на выходе...) 2)Уставка драйвера лазера "плавает" от внешней температуры, но "медленнее", чем 0,277...0,555 мГц, и не повторяет динамику вышеуказанных колебаний. Предположения: 1)Изменяется количество лазерной мощности, поступающей в волокно, из-за позиционного дрейфа луча. 2)Чувствительность волокна к возможной низкочастотной механической деформации 3)Количество лазерной мощности, поступающей на внутренний ФД, меняется - но почему APC-контур не исправляет это? Ограничение коррекции на низких частотах? Или из-за отсутствия активной термостабилизации, температурная нестабильность ЛД вносит низкочастотное запаздывание в APC-контур? Прикрепил графики стабильности мощности в ACC-режиме, в APC-режиме и график измерения темп-ы окруж.среды, когда лазер был включен в APC-режиме. На всех графиках время указано в формате часов.
-
Компания MORNSUN производит популярные микросхемы, которые всегда доступны со склада КОМПЭЛ: изолированные и неизолированные преобразователи интерфейсов, изоляторы сигналов, преобразователи напряжения и драйверы для построения изолированных вторичных источников питания. Отличные характеристики делают микросхемы конкурентоспособными и востребованными: преобразователи интерфейсов выдают высокие значения входного сопротивления и скорости передачи данных; преобразователи напряжения отличаются малыми габаритами, относительно простой схемотехникой и высоким КПД. Читать статью >>

-
IR2117 в MicroCap
Lnd опубликовал тема в Схемотехника
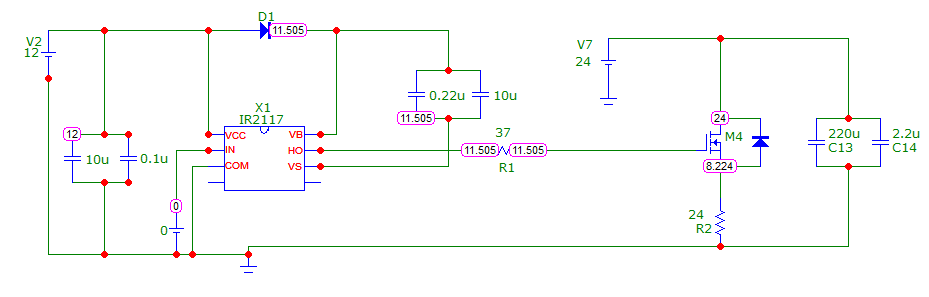
Добрый день! Попробовал собрать простую схему в MicroCap c IR2117. Если на IN подаю 0, то на выходе HO 12В Если пробую на IN 5В, то вообще начинает ругаться. Не подскажете? IR2117 simple.CIR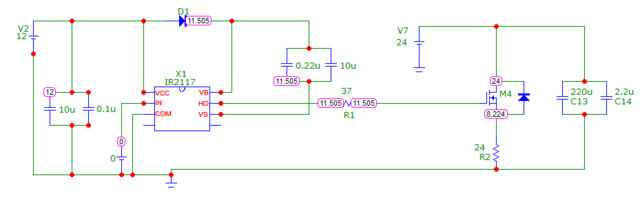
-
3-ф инвертор
Lnd опубликовал тема в В помощь начинающему
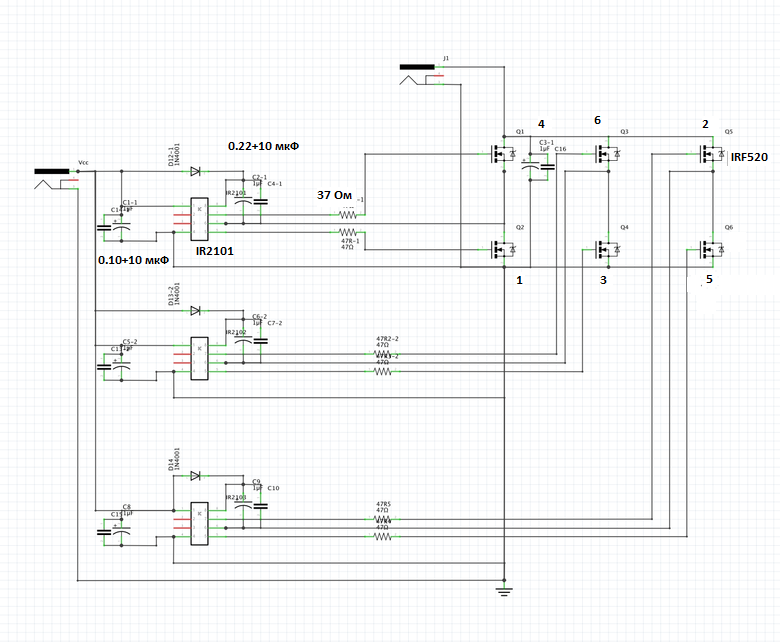
Добрый день! Хотел повторить схему из Habr: https://habr.com/ru/company/vk/blog/373397/. (Дописал на ней номиналы) Собрал, как мне кажется, всё аккуратно. В качестве контроллера использовал Arduino Leonardo. Подал ШИМ с ардуино, на все драйверы согласно последовательности как их учебников, т.е. смещенные на 1/6 периода. затем подал 12В на драйверы (IR2101). Ба-Бах ! Похоже все драйверы сгорели и ардуино тоже больше не работает. На сами ключи ничего не подавал. Нет ли ошибки в схеме?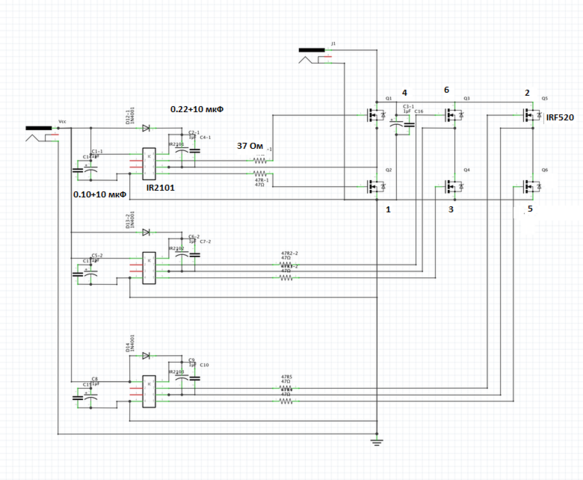
-
Компания ONSEMI представила драйвер светодиодов, который включает в себя все необходимые элементы для проектирования и управления системой освещения, подключённой через Power-over-Ethernet, включая возможности для связи в видимом свете и позиционирования в помещении – серия NCL31010. Сертификат соответствия стандартам IEEE802.3bt/at/af позволяет обеспечивать мощность системы более 90 Вт. Подробнее