nice_vladi
-
Постов
383 -
Зарегистрирован
-
Посещение
Весь контент nice_vladi
-
Я прям с Vitis не работал, к сожелению, могу что-то напутать. Но с коллегами всегда делали вот так: Нареканий не было. Правда, тут нужно один ПК постоянно держать включенным. Но, как правило, у разработчиков ПК и так постоянно включены.

-
RAD NO CODE робототехническая платформа
nice_vladi ответил Magnet тема в Робототехника
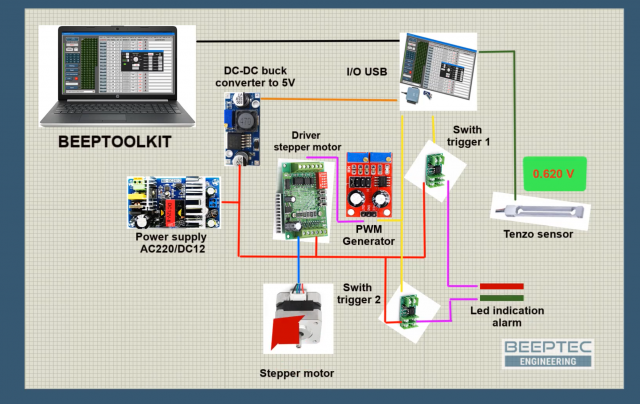
Посмотрел видео, первое, с демкой проекта. Сортировка хлеба по весу. Вопрос: на видео представлено рабочее пространство (см картинку)? Т.е. все результаты работы вашего софта отображаются в подобном формате? ЗЫ. Про бпск еще норм сентенция) "квинт эссенция нашего метода - программной симуляции многочастотного генератора (BPSK модуляция) с преобразованием посредством ADC опорных частот в "1" и по умолчанию "0"." ЗЗЫ. Почему-то концепция очень сильно напомнила ПЛК элеси и их среду codesys, может быть, от незнания. В университете были лабораторные - очень похожие макеты собирали.