Vadim_nsk
-
Постов
226 -
Зарегистрирован
-
Посещение

-
Спасибо, скачал А как правильно указать параметры для запуска скрипта тикля? ну, не нужен мне проект с таким путём Он потом ругаться будет, что не нашел исходники, а ищет он их по относительным путям. Конечно же их нет там, где он создает проект.
-
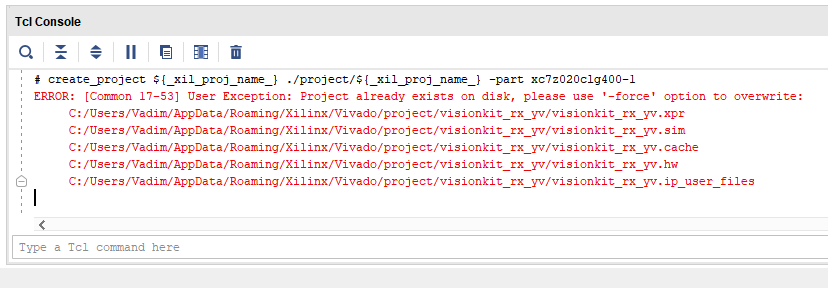
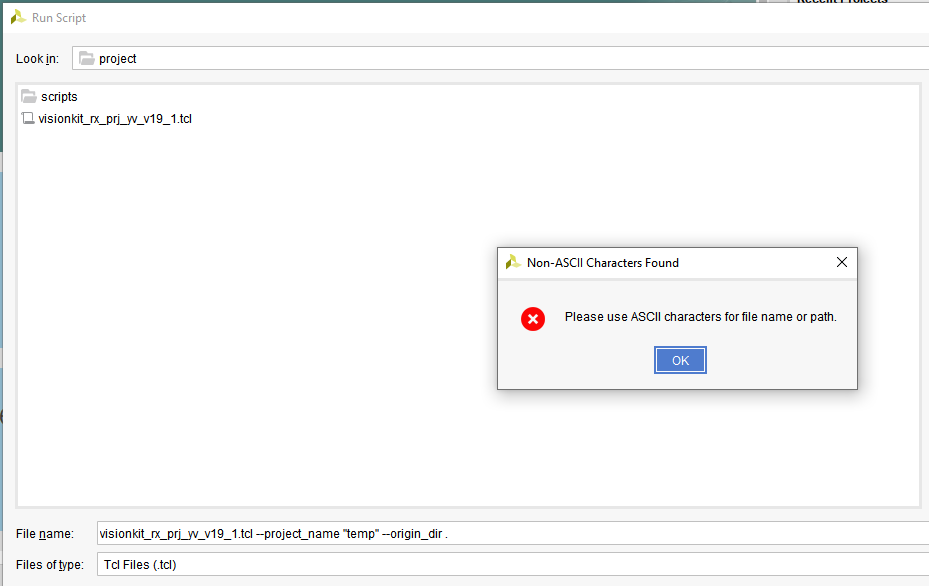
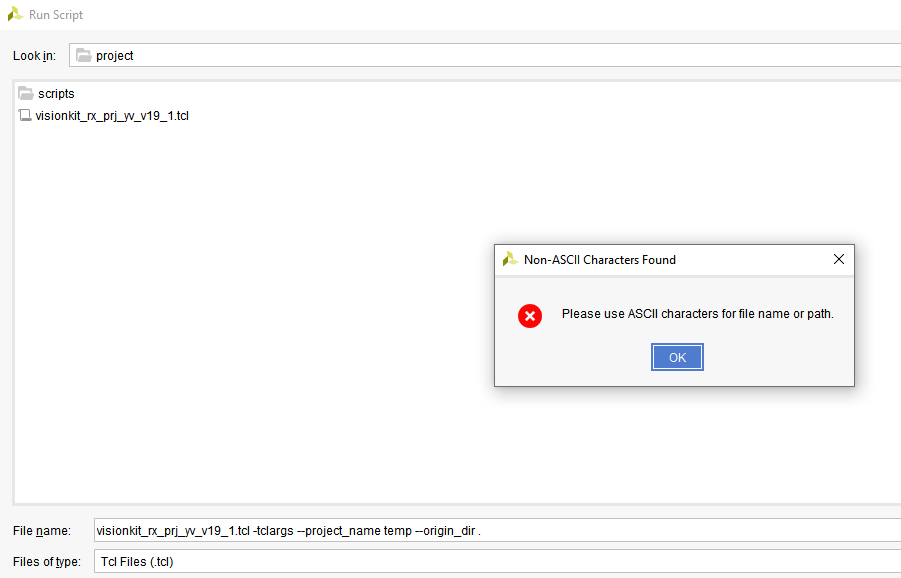
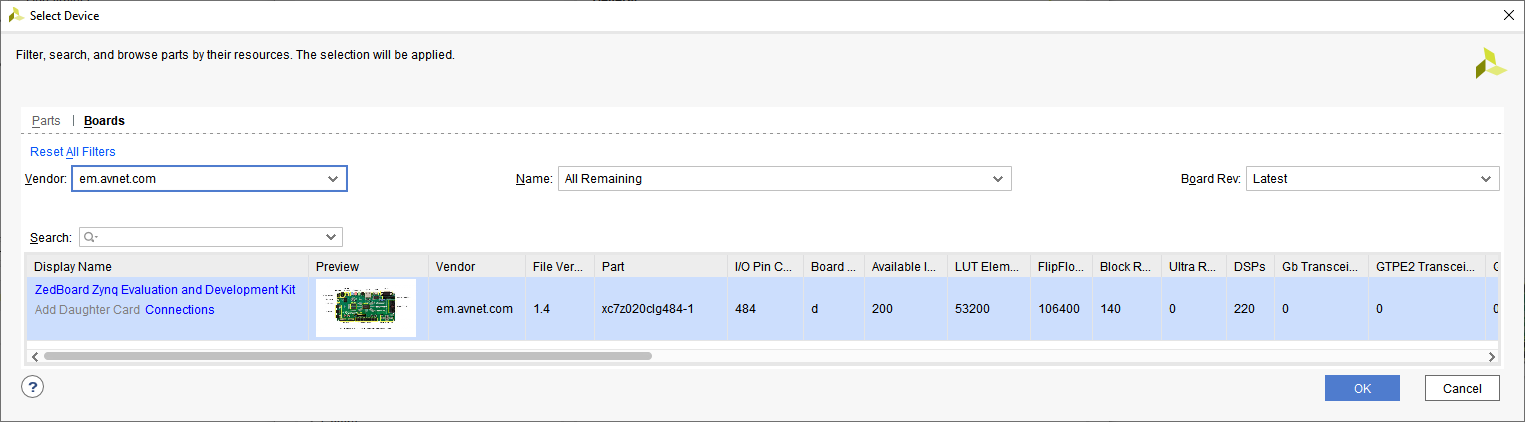
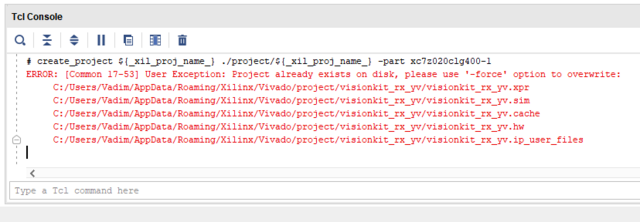
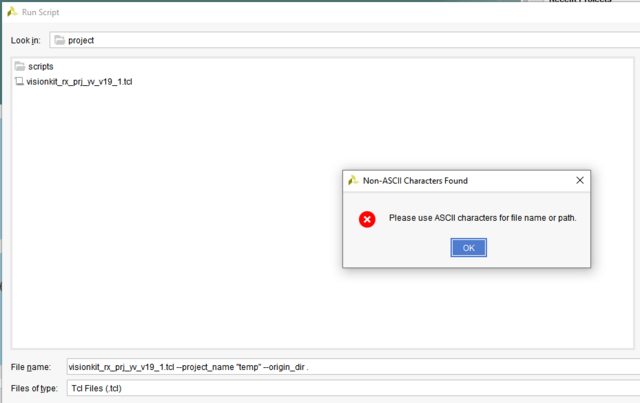
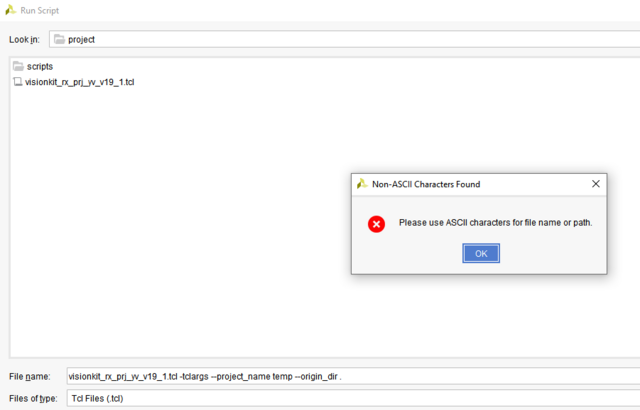
Подскажите пожалуйста как этому товарищу по имени VIVADO указать параметры? Он вроде бы подсказку выводит даже: puts "$script_file -tclargs \[--project_name <name>\]" Но и так не получается Как это правильно написать? Имя проекта задать "temp", а в качестве текущего каталога указать ".". Просто он мне выдает ошибку, что не может найти файл, показывая путь в домашнюю директорию. Хотя это возможно из-за: # set_property -name "board_part_repo_paths" -value "/home/Xilinx/vivado-boards-master" -objects $obj WARNING: [Board 49-91] Board repository path '/home/Xilinx/vivado-boards-master' does not exist, it will not be used to search board files. В самом скрипте я подменил ему название платы и чипа (на ту, что вивада позволяет мне выбрать): create_project ${_xil_proj_name_} ./project/${_xil_proj_name_} -part xc7z020clg484-1 -force set obj [current_project] set_property -name "board_part" -value "EM.AVNET.COM:ZED:PART0:1.4" -objects $obj но вот далее идет: set_property -name "board_part_repo_paths" -value "/home/Xilinx/vivado-boards-master" -objects $obj по идее, раз плата указана имеющаяся у меня в системе, она то должна быть описана. В общем, не понятно пока, как это работает.
-
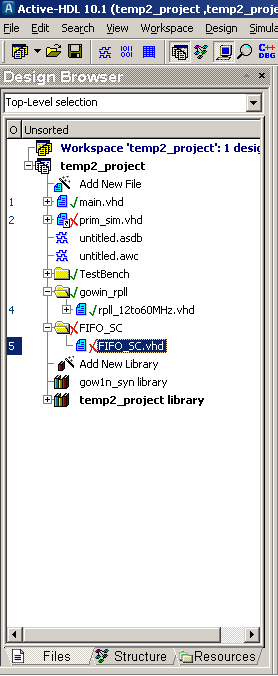
Удалось кому-нибудь собрать библиотеку симуляции на VHDL под ActiveHDL. Делаю как описано в: https://www.aldec.com/en/support/resources/documentation/articles/2189 Когда указываю VERILOG-файлы, все собирается, но тогда из VHDL не видны примитивы. Вернее, rPLL почему-то видится, а вот что-то посложнее, вроде FIFO_SC уже не могу подключить, полагая, что такой примитив недоступен для симуляции. Не знаю куда он выливает логи, но ругается примерно так: Ни одного файла на VHDL не удалось добавить в библиотеку... :-( Для rPLL добавил сам файл библиотеки в проект, но для FIFO_SC это не срабатывает Содержание синтезированного файла FIFO_SC.vhd довольно странное для меня, но ничего другого я не вижу: Как симулировать простой проект в ActiveHDL не знаю. А как сделать <code><> в сообщении сжимаемый, чтобы не был таким огромным?

-
Снова проблема... Сгенерировал свой ip, все оставил по умолчанию, даже название "myip". Генерируется битстрим, делается экспорт платформы. Но Vitis IDE в упор не видит xparameters.h. Я полагаю, что именно из-за myip, т.к. когда я его удаляю из BD, то все собирается, генерируется на выходе ELF. При этом, он не ругается на содержимое заголовочного файла, а пишет, что не может его найти, хотя он находится в BSP (не знаю как это в новых терминах называется). Захожу в testperiph.c, жму на #include "xparameters.h" и среда в него заходит, т.е. он есть и она его "видит", но: Чтобы зря не тратить ваше время на гадания, сразу приложу архив проекта. Может глянете, у кого есть время? https://drive.google.com/file/d/1o4zL8GqBPubgvcgljmpcYFZbnmoiGITc/view?usp=sharing

-
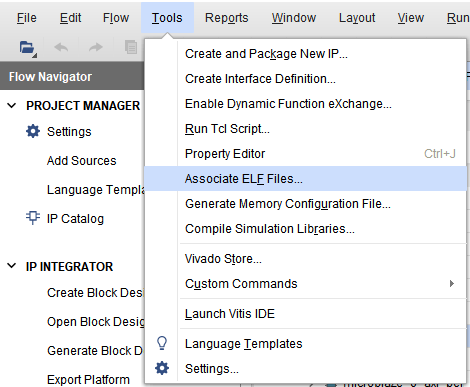
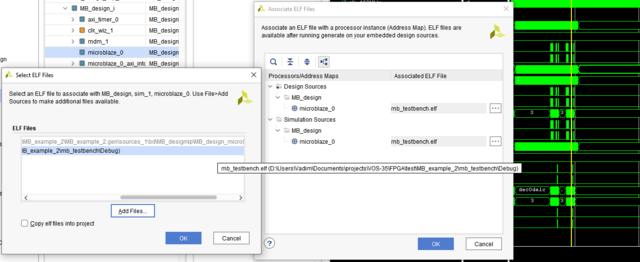
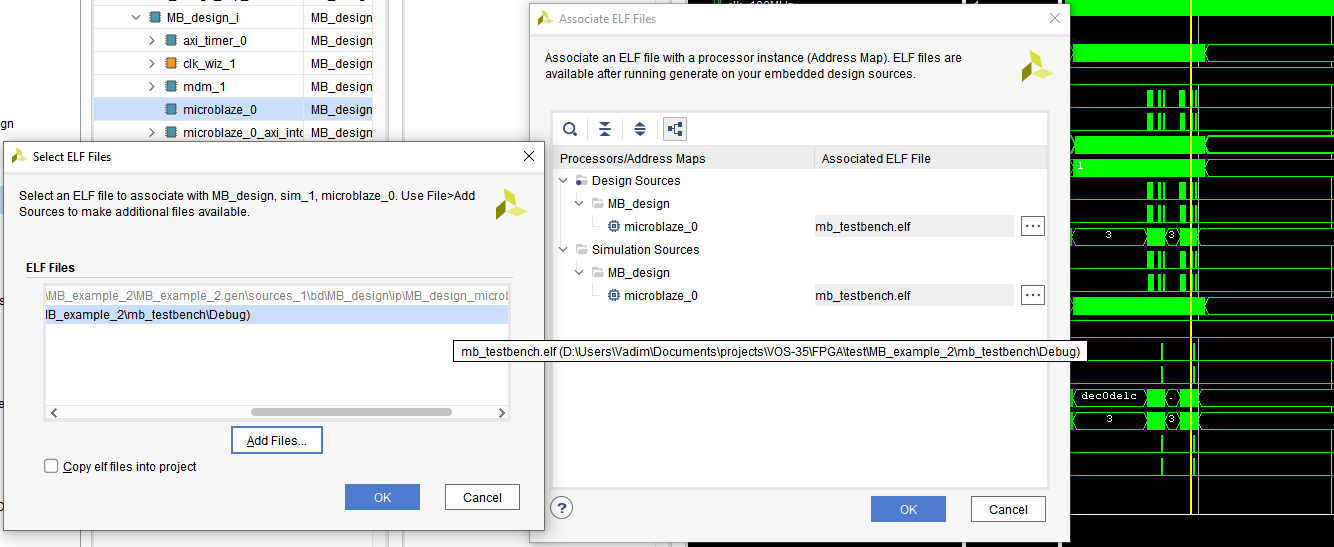
Живое общение творит чудеса. Во-первых, ELF у меня не попадал в симуляцию, т.к. я его просто добавлял в проект, а надо указать в: на фоне видна времянка работы AXI-шины, т.е. работает пример тестирования периферии. Ну и вишенка на торте. copy-past в действии, в приведенном ранее тестбенче глупейшая ошибка, не заменено имя компонента, для которого описывается архитектура тестбенча. И вот вроде бы куча примеров создания проекта, но то ли часть скринов отсутствует ввиду их очевидности, то ли так разнятся версии VIVADO, но делал все по этим примерам, а результат получал отличный от приводимого...