Digi
-
Постов
248 -
Зарегистрирован
-
Посещение






-
Quartus нужно уменьшить длину имён файлов ip
Digi опубликовал тема в Среды разработки - обсуждаем САПРы
При генерации IP корок, Quartus создаёт длинные имена файлов, которые в дальнейшем создают проблемы. Например при работе с репозиториями, архивировании и.т.д. Каким способом можно уменьшить длину создаваемых имен файлов ? Например основную часть имени генерить не как "PCIe_mm_mm_clock_crossing_bridge_0_altera_avalon_mm_clock_crossing_bridge_1920_fdcxukq.v" а более кратко ?
-
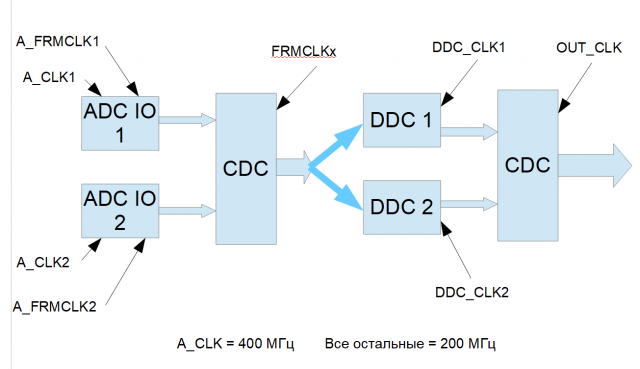
Вот например, как быть в таком случае ? Все частоты одинаковы, за исключением A_CLK. Изначально добавлял в одну группу {A_FRMCLK1 A_CLK1} в другую FRMCLKx, отдельно каждую из DDC_CLK* и отдельно OUT_CLK. Возникала ситуация, что на выходе CDC не всегда защёлкивались верные данные. Так как Quartus некоторые биты утягивал совершенно в другую сторону кристалла, а так как между этими клоками не происходил анализ времянок, то и ошибок для него не было. Если замешать все клоки в одну группу, то время компиляции возрастало до неразумных пределов, и времянки везде недотягивали до требуемых. Проект становился совершенно неработоспособным.
-
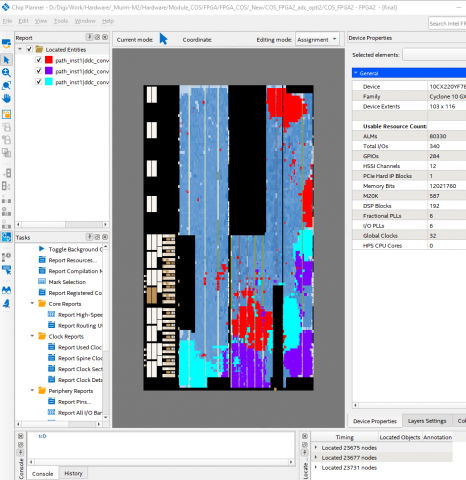
Продолжаю войну с впихиванием проекта в Cyclone 10 GX. На данный момент он состоит из 8 DDC, добился, что 7 из них работают нормально, хочу их разводку зафиксировать. Как можно зафиксировать их разводку, что бы при перекомпиляции она не менялась ? И другой вопрос, менее актуальный. Как указать фиттеру, размещать части модуля рядом друг с другом, а не раскидывать их по кристаллу. Это чисто для эстетической оптимизации )) Сейчас размещение выглядит так: