


NicSm
-
Постов
206 -
Зарегистрирован
-
Посещение
Сообщения, опубликованные NicSm
-
-
LM 431 желательно развернуть.За что вы её так?
звиняйте
Может вам будет интересно как делают другие. Схема содрана с датчика тока погрузчика тойота.
Датчик производства TAMURA. http://www.tamura-ss.co.jp/en/electronics/...or/pdf/l03s.pdf
-
возможно, дело в том, какие именно модули. мы применяем модули HITACHI (довольно древние). Было зафиксировано 4 или 5 пробоев после "замораживания" до -42 и 1 пробой после -38. Во всех случаях проверка мегомметром негодного модуля показывала, что между плитой и кристаллом недопустимо низкое сопротивление изоляции. Модули 3,3 кВ 1500А. один модуль вскрыли, вымыли бензином и спиртом этот гель, повторили замер - больше 100М сопротивление - вот и сделали такой вывод. Вроде бы начальство вступало в консультации с HITACHI и те подтвердили факт потери свойств заполнителя (но в этой информации я не уверен - слухи).
Я лично вскрывал модули 7MBR10SA120 после пробития. Изоляция м/д плитой и кристалами помоему чтото вроде металлокерамики. Кристаллы соединены м/д собой проводниками. Рвет как раз в месте соединения проводников. Причина отказы схемы драйверов. Так вот вся эта сборка кристаллов перемычек сверху залита гелем. Где рвануло там гель черный. Металл распыляется внедряется в гель и начинает проводить во все стороны. Может поэтому у вас и звонилось? После уборки геля проводить нечему.
-
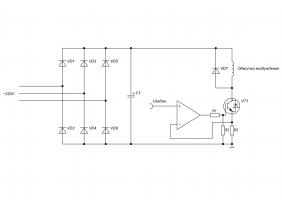
Поспешил с описанием задачи, сегодня объяснили что конкретно нужно сделать. Нужно измерять линейное напряжение ,
на двух выпрямителях один трех Фазный, другой двух с реверсом, набросал примерную схемку.
Если измерять относительно нуля до фазы , то будет фазное напряжение 310в максимум. Как измерить линейное напряжение,
без гальванической развязки ? Умножить фазовое на корень из 3 , а на двух вазовом выпрямителе? Может есть замечания по самой схеме?
Желаемый вами способ измерения возможен только в сети с не изолированной нейтралью. Как у вас и нарисовано. Иначе будете мерить эрекцию начальника.
замечания:
1.Фазное напряжение (только AC)- напряжение между "нулем" или "нейтралью" и любой из трех фаз(A,B,C). Вы близко не измеряете фазное напряжение. Вы измеряете напряжение м/д нулем и одним из полюсов выпрямителя.
2. Линейное напряжение (только AC) - напряжение м/д двумя любыми фазами(A,B,C). Вы скорее всего желаете измерить выходное напряжение выпрямителя.
3. Что касается первого трехфазного нереверсивного выпрямителя. Напряжение на R2 может меняться от 0 до 540 вольт (при входном трехфаном 380В). Соответсвенно от "нуля" до одного полюса выпрямителя напряжение будет меняться от 0 до +540/2=+270В. На втором полюсе выпрямителя напряжение будем меняться от 0 до -270В. Это еще при условии симметрии управляющих импульсов тиристоров. Если возникает перекос импульсов или тиристоры не работают правильно то при измерениях получите ошибку. VD5 R18 зачем? Да и R19?
Решение задачи измерения применение дифф каскада как советует -=TRO=-. Или делитель и блок гальванической развязки. Я лично за делитель и блок гальванической развязки для вас же безопасней.
4. Что касается реверсивного выпрямителя. Напряжение на R2 может регулироваться от -380В до +380В. Напряжение действующее. Для получения измерения близкого к реальному нужно: отсутствие перекоса входного напряжения, отсутствие перекоса управляющих импульсов.
По вашей схеме измерения: VD6,VD12 вносят большую ошибку; VD4 поменять полярность. Что касатся каскада на ОР3 не понятно зачем он. На VD13 Вы желаете получить разнополярный или однополярный?
Изменение полярности на выходе реверсивного выпрямителя нужно регистрировать? АЦП понимает + и -?
Если нужно получить разнополяный сигнал предлагаю убрать каскад на ОР3 полностью, VD1, VD4, VD6, R22, R23, R34.
Но всетаки лучше поставить дифф каскад. Вместо Вашей схемы на ОР2-ОР3.
-
на счет "перестать работать навсегда": мощные IGBT-модули заполняются (во всяком случае некоторые, что мне попадались) каким-то изолирующим теплопроводным гелем типа силикона... так вот, этот гель при охлаждении ниже -40° необратимо становится токопроводящим...
Про проводимость геля это многократные наблюдения? К нам с 2002 по 2007 были большие поставки преобразователей частоты с IGBT. Зимой на улице -50 случается довольно часто. Транспортируется хранится все это добро в не отапливаемых условиях. Но ни одного случая отказа по электропроводности геля не случилось. Жаль щас -15. Но если будет 40 и ниже проверю.
-
Для тех кто до сих пор не понял. Не момент зависит от потребляемой из сети мощности, а потребляемая мощность определяется моментом, который в свою очередь определяется нагрузкой, то что двигатель должен крутить. Если Вы застопорите вал, то механическая мощность, та которая при расченте кпд считается полезной, будет равна 0, а потребляемая вся уйдет на потери. Этот режим в приводе называют по аналогии с электротехникой коротким замыканием. Если двигатель у Вас крутит воздух, режим холостого хода, то опять механическая (полезная) мощность 0, а вся потребляемая идет на покрытие внутренних потерь в двигателе. Именно поэтому и есть понятие номинального режима, для которого оптимизированы параметры машины. Для него и указывается кпд.
P.S. Изучение матчасти никто не отменял.
Согласен с Вами. Если говорить про электропривод как ДПТ так и АД приведенные аналогии имееют место. Прочитал внимательно. Не пойму откуда у evgeny_chа столько желчи.
-
NicSm, наверно не резонанс токов а напряжений... и L2 должен стоять между источником и фильтровым конденсатором C2 а не после - режим для тиристоров будет тоскливый. Ещё диоды встречно-паралельно тиристорам поставить не помешает
диоды согласен, они принципа не меняют, приближают к реальности.
резонансы перепутал.
-
Задача разработать генератор на тиристорах включенных по мостовой схеме на 500гц.
При включение заряжается емкость С1 до 300в , после с схемы управления приходит
импульс на тиристоры V1 v2 и емкость С1 разряжается на контур, в нем возникают
угасающие колебания с резонансной частотой 500гц, потом через обратную связь
импульсы через трансформатор поступают в схему управления, в которой микроконтроллер
выдает импульсы на тиристоры полумостов для поддержания генерации.
В какой момент нужно подавать импульс на тиристоры полумоста, или так когда угол полуволны сколько
градусов?
Как ваша схема? Работает?
У вас инвертор нагружен контуром с резонансом напряжений. Для такой схемы управление усложняется.
В конце 90х я хотел собрать нечто подобное. Из силовых ключей доступны были только тиристоры.
Только я расчитывал на резонанс токов. Хотел сделать заводилку для машины когда холодно и акк не тянет.
Забросил дальше расчетов не пошло. Схема силы расчитывалась такая.
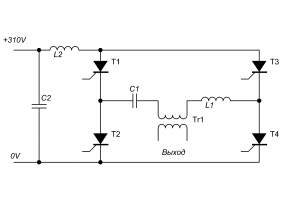
Подаем отрывающие импульсы на Т1, Т4. Через С1 L1 Tr1 пойдет ток.
При этом коммутация более предсказуемая когда С1 зарядится ток через тиристоры будет менее тока удержания и он закроются.
Потом открываем Т2, Т4. C1 перезаряжается и тд.
Может Вам пригодится.
-
Так наверно и сделаю. два транса, операционники..
То чем вы собираетесь заняться и есть усложнение жизни.
Может ваши требования которых я не знаю это и оправдывает.
Но ваша первая схема на 100% работающая. У меня на производстве таких штук 80.
Работают очень надежно и не нада дополнительно питания.
Человек который привел моделирование вбросил дэзу. Скорее он сам искренне заблуждается и верит что его модель на 100% или 99% соотвествует реальной схеме.
Даже если брать источник напряжения а не тока диаграммы будут не такие.
Элементарно откройте любой учебник где рассматривается мостовой 3х фазный выпрямитель и посмотрите эпюры.
Не верите им соберите в реале 6 диодов и резистор найти не проблема. Правда 3фазы можно взять на производстве или в лаборатории.
Сам лично собрал таких схем около десятка только номиналы ТТ и резисторов другие.
-
Ваша схема работоспособна. Подобное решение часто применялось в приводах постоянного тока.
Измеряемый ток синусоидальный? По всей видимости тт у вас будет стандартный 200/5 мощностью 5ВА.
При 200А вторичная мощность 2диода + резистор 1Ом Р= (0,6*2+5*1)*5=31ВА. Многовато. Погрешность для этого случая пока не соображу.
-
Так ни кто и не ответил. Сам уже разобрался. Устройство починено. в итоге что было неисправно: 6 транзисторов IRF305. 2 шт sg2525 заменил их на sg3525. И драйверный каскад BC337-40 : BC556B. Трудно судить что было причиной может и драйверный каскад транзистор что подавал + на затворы (BC337) к-э короткое.
Тему можно считать закрытой.
-
Спасибо большое, попробую, идею понял. Если что отпишусь!!!
Здравствуте Romius80.
Как у вас продвигаются дела по стабилизатору?
ЦП1-2 у вас работают? Спрашиваю потому что в декабре нам говорили что, изза кризиса БЛПК остановили полностью и весь обьем заказов сбросили на нас.
Мы декабрь-январь-февраль работаем на полную производительность. Нас пугали что братск полостью в простое на 2/3зп и если что и нас так отправят.
-
Должно работать. Возни однако..
R3 - регулятор тока. Мож., и возбуждаться будет, из-за емкости обмотки. Тогда надо цеплять конденсаторы на шунт или на вход верхнего компаратора.
Вы предложили релейный стабилизатор. Пусть топикстартер не удивляется что схема работает в импульсном режиме.
-
Похоже Вы всеже настроились на линейный стабилизатор тока. Из даташита максимальная мощность модуля 2100Вт. Что немного больше расчетной мощности 350В*5А=1750 Вт.
Но радиатор должен быть очень большой.
даташит http://www.hy-line.de/fileadmin/hy-line/po...CM300DY-24H.pdf
Если всеже остановиться на линейном стабилизаторе думаю можно начать с такой схемы
Для стабилизатора тока известная проблема - возбуждение при работе на реактивную нагрузку. Борятся обычно введением дополнительных обратных связей по напряжению и частотной компенсацией.
-
Какой-такой ШИМ... Релейное управление при такой индуктивности. Компаратор с гистерезисом. Время может получиться... боюсь подумать... доли секунды. Или не доли даже...
Релейное управление как то не красиво. Вероятно подойдет. Главное реализация. Как будите поддерживать заданную точность?
-
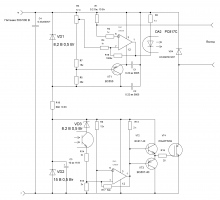
Дело в том, что энкодер к движку никак не присобачить. Исполнение и регулирование привода 1965 года аналоговое. Стоит тахогенератор, но в системе регулирования не участвует в силу большой длины пром. вала (сказывается упругость вала на скручивание, инерционная масса около 1000 тонн). Двигатель крутит машину целюллозного потока. Проблемы в том, что после длительного простоя в ППР, при запуске машины (включение вакуума, отсос конденсата и т.д.) ток доходит до номинала и выше, и держится в течении 2-3 часов. Регулировка нейтрали двигателя даёт эффект в лучшую сторону, но возникает проблема с качеством намотки целюллозы, т.к. в системе регулирования накатов стоят магнитные усилители, у которых малая зона регулирования и большое время отклика на изменение сигнала. Пробовали разнообразные варианты и пришли к выводу, что нужно стабилизировать ток в ОВ для поддержания стабильной скорости. Схема на усилителе прилагается. Прошу направить в нужное русло. По поводу закона Ома я в курсе, напряжение не проблема, если надо подкинем, отталкивайтесь от тока стабилизации 5А - 6А. Но нестабильность тока в больших пределах более 0.3 А на каждые 5 Ом нагрузки приводят к изменению скорости машины и следовательно к обрыву. Учтите, что нагрузка индуктивная, а на схеме я указал нагрузку чисто активную. Вместо биполярного транзистора поставил IGBT, потому что они просто у нас валяются без дела, хоть найти применение и есть повод. Сильно ногами не пинайте, но помощь в корректировке в нужном направлении очень нужна!!!
Здравствуйте Romius80. Привет коллегам.
Сдается мне что вы с Братска. Там я видел сушильные машины по описанной вами схеме. Сам я усть-илимский у нас мехвала нет.
Что касается проблемы.
1. Я думаю Нужно говорить про разброс параметров разных двигателей Rвозбуждения от 30 до 100 Ом. Если у Вас при нагреве так сильно меняется (3,3раза) сопротивление нужно скорее говорить о неисправности двигателя. Чем намотана такая обмотка я удивляюсь. В Братске к примеру двигатели как мне говорили импортные как раз 60х годов. Таких проблем быть не должно. Может их обследовать и в ремонт?
2. Двигатель 460кВт сопротивление возбуждения должно быть 30 - 10 Ом. У нас на Гауче двиг 200кВт Rвозб~20 Ом. А 100 ом для двигателей на 7,8кВт более типично.
3. Ваш стабилизатор должен выдавать напряжение в районе 220В и стабилизированный ток точно 5А +-0,2А. По вашим данным для 30-100 Ом напряжение с выхода стабилизатора от 150 до 500 Вольт. Впечатляет? Если делать линейный стабилизатор то в худшем случае на транзистор придется 350В*5А=1750 Вт. Транзистор не выдержит.
4. На пульсации выходного напряжения не обращайте внимания. Индуктивность ОВ очень большая. Прямой зависимости м/д пульсациями напряжения и така нет.
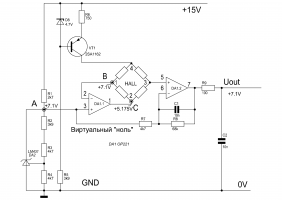
Подумайте над использование следующей схемы. Просто советую для Вашего случая самое то.
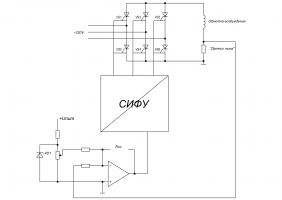
Гальванические развязки не показаны. Датчик тока-возможны варианты. Показан только сам принцип.
Если не нравится и кажется устаревшим можно подумать про импульсный стабилизатор с использование вашего IGBT. Схема получится тоже довольно простая частоту ШИМ можно задать примерно на 1кГц.
Ну уж и совсем чисто из теоретического интереса можно взять источник постоянного тока 12,5 кВ добавочное сопротивление 2500 Ом мощностью 62,5 кВт и так же получите заданную стабилизацию тока.
Двигатель на 460 кВт, реальный разброс сопротивления ОВ от 55 до 67 Ом. Изменение температуры в цехе около 40 градусов. Нужно точное поддержание скорости менее 1%. Стабилизированный ток 5А +- 0.2А вполне устраивает, пульсации по возможности минимальные. По временам не допонял, можно точнее.Эти данные уже ближе к реалиям. Но опять же точность поддержания скорости +-1%. В вашем случае вероятно регулируется напряжение якоря (ОС по напряжению).
А скорость ДПТ

Получается если меняется нагрузка скорость будет плавать.
-
Ну упс и даеть энергию только вот от акумов а насчет входного напряжения до последнего так тут пороги выставляються обычно либо программно либо резисторами правда вот резисторы не всегда найдешь !!! А спектральный параметры на частоте 50 достаточно легко получить !! Да фильтр надо полосовой и как правило на резанансной основе тоесть с контуром колебательным на 50 Гц настроеным !
Получить то довольно легко учитывая развитие МК но смысел? В чем идея не улавливаю? УПС ставится там где проблема с сетью, что за фигня если сеть хорошая то и УПС ведет себя хорошо.
Может быть что в упсах при не нормальной форме напряжения PFC с ума сходит. (как идея для проверки)Думаю PFC сюда притягивать не надо. Если у него едет крыш то но сильно плохой.
Был такой компьютерный блок питания с PFC. Включали его в преобразовательной подстанции. Искажение синусоиды там очень большое.
Сдох БП через год и то потому что первый электролит кондер рванул.
-
Я в свое время тоже имел желание поставить хороший сетевой фильтр. Готового в наличии не было но можно было сварганить из рассыпухи есть дроссели и конденсаторы хорошие. Меня отговорили сослуживцы сам объект на другом участке и в другом предприятии. Они достаточных усилий для решения проблемы не приняли а мне получается опять надо больше всех. Как бы насильно и забесплатно приходится решать проблему.
По поводу спектрального анализа питающей сети это круто. Даже через чур. Я все время считал что УПС должен любыми путями обеспечивать нагрузку током. Это значит с источника питания он должен брать энергию до последнего. И тут при нормальном действующем напряжении появляется импульсная помеха которая энергетические параметры не нарушает и все упс на спинку? правда есть упсы которые на начальном этапе берут входное напряжение и делают к нему добавку, получают нормированное значение. Может с этими упсами такие проблемы?
-
Двигатель на 460 кВт, реальный разброс сопротивления ОВ от 55 до 67 Ом. Изменение температуры в цехе около 40 градусов. Нужно точное поддержание скорости менее 1%. Стабилизированный ток 5А +- 0.2А вполне устраивает, пульсации по возможности минимальные. По временам не допонял, можно точнее.
Заходишь точно не с того конца. Для стабилизации скорости нужен датчик скорости ( энкодер, тахогенератор ) и регулятор скорости.
Если очень хочется стабилизировать ток возбуждения ДПТ то используй импульсный стабилизатор. Линейный тут перебор. Тут можно ставить даже управляемый выпрямитель напряжения с обратной связью по напряжению. Быстродействие большое не надо.
IGBT модуль CM300DY-24H наверно снят с мощного привода FR-A500? Там такие.
-
Про ШИМ читаю...
А транс на 50 Гц можете посоветовать поминиатюрнее? Чтоб желательно в 15 мм по высоте влез :)
По вашим данным P=110*0.25=28Вт плюс КПД итого мощность от 35 до 40 Вт.
а 15мм это чтото вроде 1 вата да и то если тороид. Или изменить требования или отказаться от НЧ трансов.
-
Не DC брейк. Просто стабилизация положения ротора. В случае с асинхронником, поле статора нужно крутить в сторону противоположную моменту.
А охлаждать принудительно нужно любой, коль не крутится при номинальной частоте 50гц.
По нагреванию от DC брейк ничем не отличается. Токи текут возможно под номинал. Ротор стоит. охлаждение минимальное.
Принудительно из моей практики охлаждать надо при частоте менее 15~20Гц в других случаях если есть охл крыльчатка перегрева не отмечали это относится для двиглов от 1500rpm и выше.
-
Или энкодер + контроллер с мозгами. Видел на выставке - никакого тормоза, а вал стоит как вкопаный.
тормоз проще и надежнее. ИМХО. Особенно если время удержания длительное.
-
У нас дохлые семикроны вполне красивые разве что цвет пласмассы слегка побежал. Но у нас нагрузка мягкая. Регулирует напряжение на входе повышающего трансформатора. Но вот почему дохнут не ясно.
Если у Вас возможен сквозняк в схеме тогда могут быть и сажа и перхоть.
-
Синхронный двигатель при частоте коммутации 0 и идущем токе по статору будет иметь одно или несколько устойчивых положений (зависит от числа пар полюсов). Если вы в устойчивом (статическом) состоянии приложите к валу синхронного двигателя вращающий момент больше чем момент удержания статора то сможете перескочить из одного положения в другой.
Для асинхронного двигателя в это режиме может быть бесконечное (теоретически) число положений. Постоянный ток текущий по обмоткам будет мало препятствовать мееедленному вращению ротора. Но только вы увеличите скорость вращения ротора (руками) как обнаружите что с увеличением оборотов крутить все труднее.
По поводу начальной частоты. Её ставят 1Гц или на более новых приводах немного меньше. Связано с тем что на таких малых частотах вращения затруднительно получить заданный вращающий момент. Если возьмем например двигатель на максимальную частоту вращения для 50Гц. При синхронной скорости 3000 об/мин реальная номинальная скорость запросто может быть 2940 об/мин или даже менее. а синхронная частота 2940 об/мин соответствует 49Гц. Итого мы 1Гц теряем на скольжении (разность синхронной и реальной скорости вращения). Это величина грубо одинакова в диапазоне регулирования скорости вращения асинх двигателя посредством изменения частоты питающего напряжения. Вот и получаем что бы двигатель просто стоял нужно подать на него напряжение с F~1Гц или около того. А если вы подадите постоянный ток то в зависимости от знака и величины внешнего момента приложенного к валу можете получить медленный самоход. Иногда это очень плохо и в этом случае с преобразователем и асинх двигателем применяют механический тормоз.
-
Мне кажется синхронный должен быть порезвее асинхронного, и тормозить-разгоняться должен быстрее. Понятно, что с обычным ПЧ это будет "жалкое подобие" серво, но пока сгодится. Из проблем вижу сложности с удержанием в заданном положении, обычный ПЧ умеет только крутить начиная с 1Гц.
про темп разгона я писал только для начала, пока вы (а я тем более) не знаете какая пропорция u/f . Скорее я написал не корректно.
Ваш Двигатель конечно порезвее. Преобразователь на 220В на выходе имеет импульсы амплитудой ~300В. Размах 600В. Смотрите выдержит ли двигатель. Пока параметров на двигатель на сайте не нашел.
Может будет лучше собрать чтото на АТМЕГЕ например AVR443 AVR444? Там то вы сможете реализовать поболее чем на частотнике.



Многоуровневый мостовой выпрямитель.
в Силовая Преобразовательная Техника
Опубликовано · Пожаловаться
Для бакалавра слишком размыто. Похоже устройство называется иначе. Это три выпрямителя на которые подаются напряжения с разным сдвигом фаз для каждого выпрямителя. Но уровни (амплитуды) фаз должны быть одинаковые.Это самый разумный вывод из ваших слов но где здесь настройка? Угол сдвига задается коммутацией вторичный обмоток при условии использования 3х фазной сети.