После попытки установки Universal Scan вооще перестал работать JTAG cable.
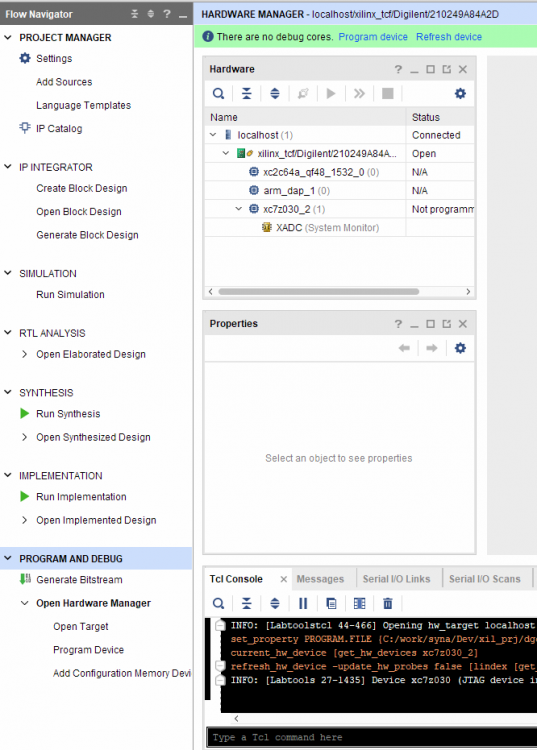
Когда кабель ещё работал, при поптыке программировани FPGA в Vivado выглядело так. В "Hardware Manager" выбираем "Open Target", коннектимся и видим:
open_hw
connect_hw_server
INFO: [Labtools 27-2285] Connecting to hw_server url TCP:localhost:3121
INFO: [Labtools 27-2222] Launching hw_server...
INFO: [Labtools 27-2221] Launch Output:
****** Xilinx hw_server v2017.4.1
**** Build date : Jan 30 2018-15:49:02
** Copyright 1986-2017 Xilinx, Inc. All Rights Reserved.
open_hw_target
INFO: [Labtoolstcl 44-466] Opening hw_target localhost:3121/xilinx_tcf/Digilent/210249A84A2D
set_property PROGRAM.FILE {C:/work/syna/Dev/xil_prj/dgcb3045/dgcb_xc7z030_tst04/dgcb_xc7z030_tst04.runs/impl_1/top_dgcb_xc7z030.bit} [get_hw_devices xc7z030_2]
current_hw_device [get_hw_devices xc7z030_2]
refresh_hw_device -update_hw_probes false [lindex [get_hw_devices xc7z030_2] 0]
INFO: [Labtools 27-1435] Device xc7z030 (JTAG device index = 2) is not programmed (DONE status = 0).
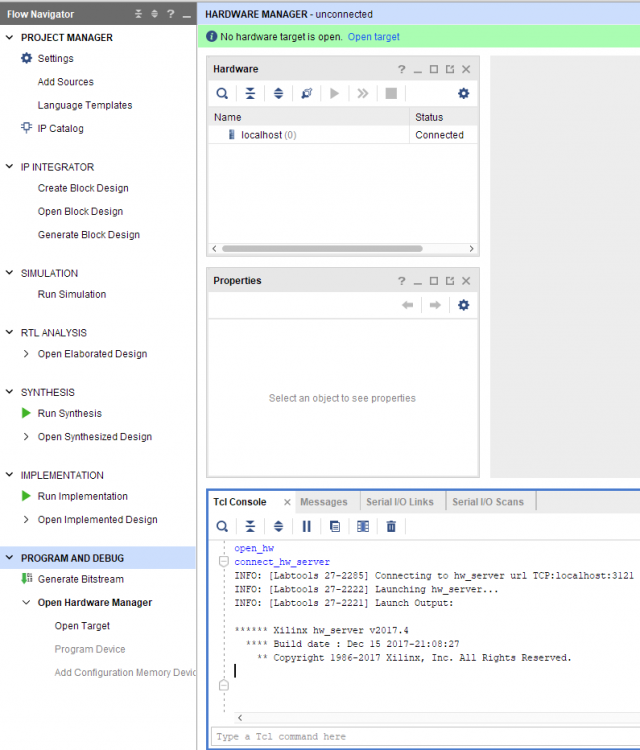
Теперь это выглядит так:
open_hw
update_compile_order -fileset sources_1
connect_hw_server
INFO: [Labtools 27-2285] Connecting to hw_server url TCP:localhost:3121
INFO: [Labtools 27-2222] Launching hw_server...
INFO: [Labtools 27-2221] Launch Output:
****** Xilinx hw_server v2017.4
**** Build date : Dec 15 2017-21:08:27
** Copyright 1986-2017 Xilinx, Inc. All Rights Reserved.
Процесс как будто обрывается, до команды 'open_hw_target' не доходит.
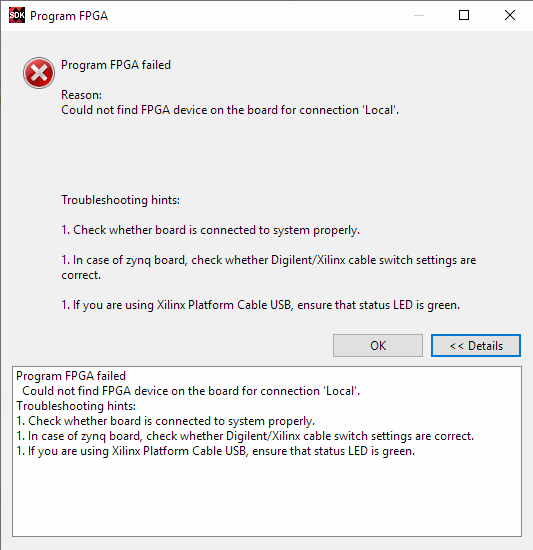
В SDK тоже ничего:
В XSCT консоли команда 'connect' как будто отрабатывает, а 'targets' ничего не выдаёт.
В ISE Impact то же выглядит будто кабель не подключен:
Welcome to iMPACT
iMPACT Version: 14.7
// *** BATCH CMD : setMode -bs
// *** BATCH CMD : setMode -bs
// *** BATCH CMD : setMode -bs
// *** BATCH CMD : setMode -bs
GUI --- Auto connect to cable...
// *** BATCH CMD : setCable -port auto
INFO:iMPACT - Digilent Plugin: Plugin Version: 2.4.4
INFO:iMPACT - Digilent Plugin: no JTAG device was found.
AutoDetecting cable. Please wait.
*** WARNING ***: When port is set to auto detect mode, cable speed is set to default 6 MHz regardless of explicit arguments supplied for setting the baud rates
PROGRESS_START - Starting Operation.
Connecting to cable (Usb Port - USB21).
Checking cable driver.
Source driver files not found.
The Platform Cable USB is not detected. Please connect a cable.If a cable is connected, please disconnect
and reconnect to the usb port, follow the instructions in the 'Found New Hardware Wizard', then retry
the Cable Setup operation.
Cable connection failed.
Connecting to cable (Parallel Port - LPT1).
Checking cable driver.
Your driver installation is not complete. Please re-run your application or run
install_drivers.exe from the ISE installation area as an Administrator to complete the driver installation.
Service using windrvr6.sys : SYSTEM\CurrentControlSet\Services\WinDriver6.
ImagePath = \SystemRoot\system32\drivers\windrvr6.sys.
Start = 3.
ErrorControl = 1.
Type=1.
Cable connection failed.
Connecting to cable (Parallel Port - LPT2).
Checking cable driver.
Your driver installation is not complete. Please re-run your application or run
install_drivers.exe from the ISE installation area as an Administrator to complete the driver installation.
Service using windrvr6.sys : SYSTEM\CurrentControlSet\Services\WinDriver6.
ImagePath = \SystemRoot\system32\drivers\windrvr6.sys.
Start = 3.
ErrorControl = 1.
Type=1.
Cable connection failed.
Connecting to cable (Parallel Port - LPT3).
Checking cable driver.
Your driver installation is not complete. Please re-run your application or run
install_drivers.exe from the ISE installation area as an Administrator to complete the driver installation.
Service using windrvr6.sys : SYSTEM\CurrentControlSet\Services\WinDriver6.
ImagePath = \SystemRoot\system32\drivers\windrvr6.sys.
Start = 3.
ErrorControl = 1.
Type=1.
Cable connection failed.
Connecting to cable (Parallel Port - LPT4).
Checking cable driver.
Your driver installation is not complete. Please re-run your application or run
install_drivers.exe from the ISE installation area as an Administrator to complete the driver installation.
Service using windrvr6.sys : SYSTEM\CurrentControlSet\Services\WinDriver6.
ImagePath = \SystemRoot\system32\drivers\windrvr6.sys.
Start = 3.
ErrorControl = 1.
Type=1.
Cable connection failed.
PROGRESS_END - End Operation.
Elapsed time = 2 sec.
Cable autodetection failed.
WARNING:iMPACT:923 - Can not find cable, check cable setup !
Попытался:
1. Удалить Universal Scan.
2. Переустановить драйвера кабеля (в Vivado и в ISE).
3. Откатиться на Recovery Point до установки Universal Scan.
Пока эффект нулевой. Кроме как переустановки ОС даже не знаю, что ещё попробовать. Осталось только убедиться, что кабель ещё действительно работает (но так как это удалённо, пока нет возможности).
Может сталкивался кто с подобным поведением?