Сергей Борщ
-
Постов
10 863 -
Зарегистрирован
-
Посещение
-
Победитель дней
28
Весь контент Сергей Борщ
-
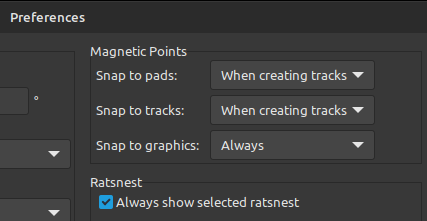
Проверил - та же фигня. К контуру платы привязывается, к User.comments и User.graphics - нет
-
У меня там есть snap to graphics, его можно поставить Always.
-
Погода и выкроенное свободное время позволили, наконец-то, завершить ремонт у соседки. Я просто оставлю это здесь. Абориген делал, не какой-то там "акупант"! Строители у нас тут тоже талантливые (тоже из аборигенов были). Справа - один кабель уходит к воротам, а второй сначала ныряет под брус, на котором закреплена обшивка фасада и потом по стене поднимается к прожектору над дверью. Из коробочки слева провод уходит в стену, в стене поднимается к выключателю в помещении, за которым спрятана распредкоробка. Все это время ворота стояли открытые нараспашку, кто-то сильный пытался их закрыть и теперь надо ремонтировать (или менять) бетонный столб, на котором был закреплен механизм привода ствоки. Соседка сказала, что она уже нашла, кто это будет делать.



-
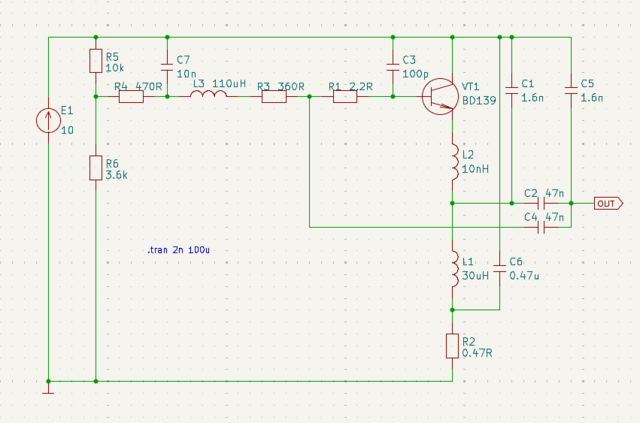
Брат попросил починить. Схема простая, всего один транзистор 2SC3835. Был пробит переход база-эмиттер. Не задумываясь заказал новый (не с али), впаял. Заодно измерил емкость излучателя - ноль. Вытащил излучатель из силиконового крепления - оказалась оторвана пайка провода с небольшим кусочком напыления от пластины. Припаял обратно на бессвинцовый припой с серебром, собрал, включил - работает: пар, брызги во все стороны. Тут же выключил. Решил отправить брату фото, включил - снова брызги, быстро сфотографировал, выключил. Подошел сынишка, хотел показать ему, включил - не работает. Разобрал - точно такой же пробой перехода база-эмиттер, суммарно схема проработала не более 5 секунд. Заказывать еще один транзистор чтобы сжечь как-то не хотелось (около 5 евро/штука), полез в закрома, нашел несколько разных транзисторов в таком же корпусе от строчных разверток мониторов с ЭЛТ. Вроде и по току и по напряжению с запасом, впаял первый попавшийся - не работает. Ну то есть ни пара, ни брызг. Запитал от ЛБП пониженным напряжением, ткнулся осциллографом - генерация есть, но на примерно 1.6 МГц. Впаял другой транзистор - то же яйцо, только в профиль. Срисовал схему, коллега опознал в ней емкостную трехточку и предположил, что причина генерации на такой высокой частоте может быть вызвана слишком низким коэф. передачи тока у транзисторов от строчной развертки (5-15 против 70-220 у оригинального). Впаял BD139 (предварительно измерив коэф. передачи - около 160) - все равно генерация на 1.6 МГц. Все конденсаторы и резисторы промерил, номиналы соответствуют. Я в этих трехточках как-то не силен, попробовал запустить симуляцию в кикаде - не получается, выдает ошибку "TRAN: Timestep too small; time = 3,10635e-08, timestep = 2,5e-21: trouble with node "probe_int_net-_vt1-e__l2_1" run simulation(s) aborted". На всякий случай выкладываю проект, может кто подскажет, что я делаю не так. С5 - излучатель, изменением R4 в пределах 240 Ом...5.1 кОм регулируется интенсивность пара, R5 - подстроечный 10 кОм последовательно с постоянным 3.9 кОм, суммарно на моем экземпляре примерно 10 кОм выставлено, L2 - 5 витков диаметром ~5 мм провода ~0.2 мм без сердечника (номинал в схему вставил с потолка). Питание схемы - 50 В с трансформатора через диодный мост (без сглаживающего электролита). Основной вопрос - что можно в этой схеме подкрутить, чтобы заставить ее работать как надо с имеющимися под рукой транзисторами, например с 2SC5802? Да и вообще комментарии по поводу схемы было бы интересно услышать. humidifier.zip
-
stm32f747 + Ethernet (LwIP)
Сергей Борщ ответил SapegoAL тема в STM
Мне кажется, это немножно перебор: