Alex_Malder
-
Постов
65 -
Зарегистрирован
-
Посещение
Информация о Alex_Malder
-
Звание
Участник
")
-
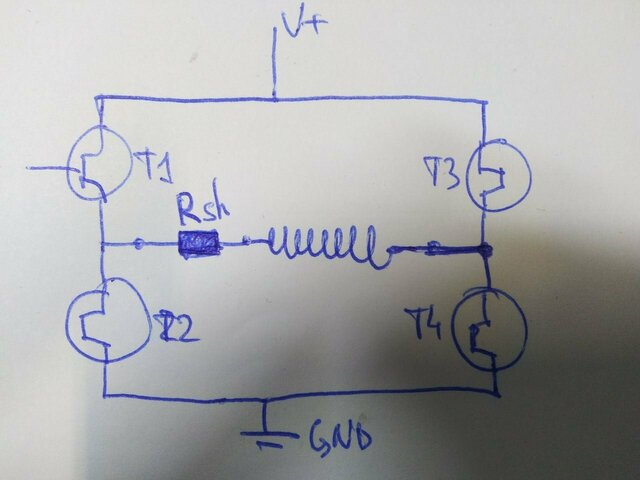
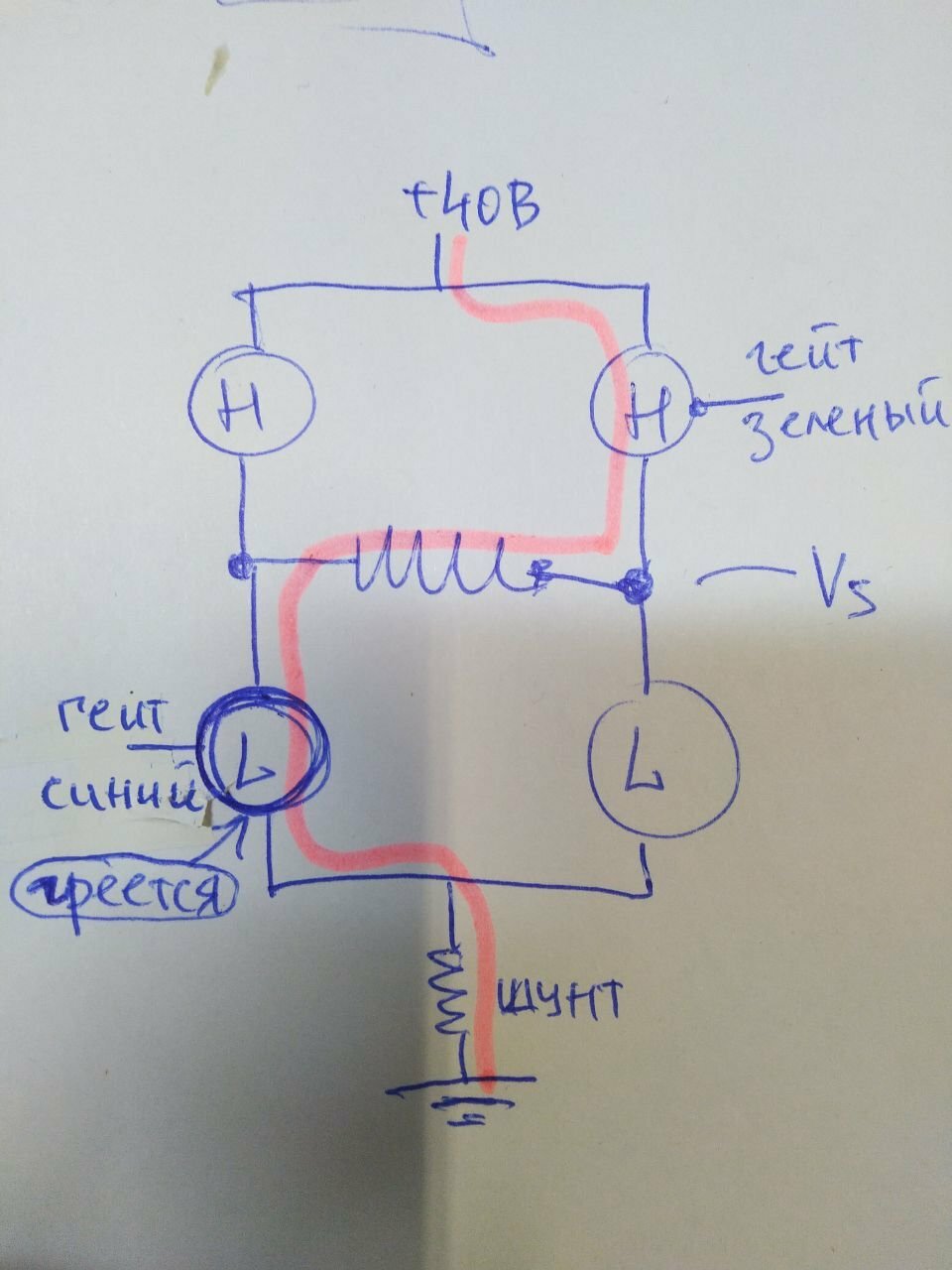
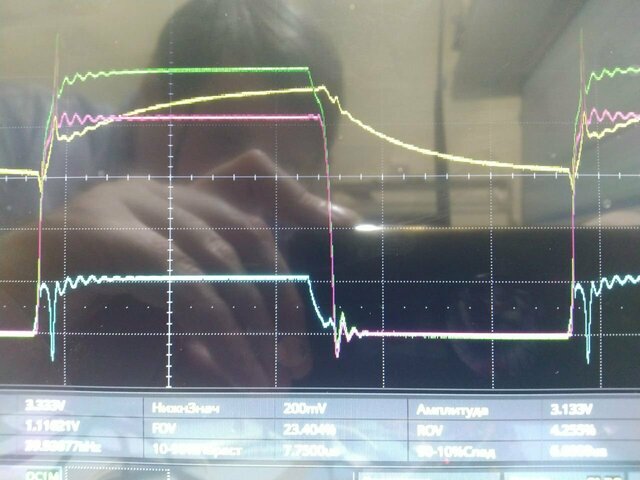
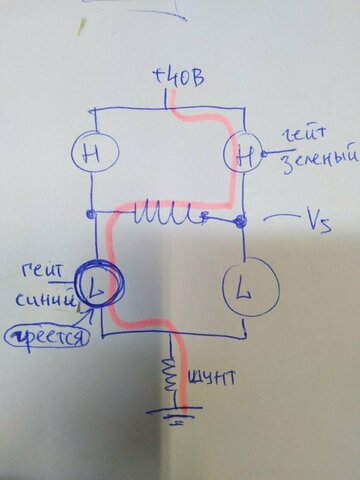
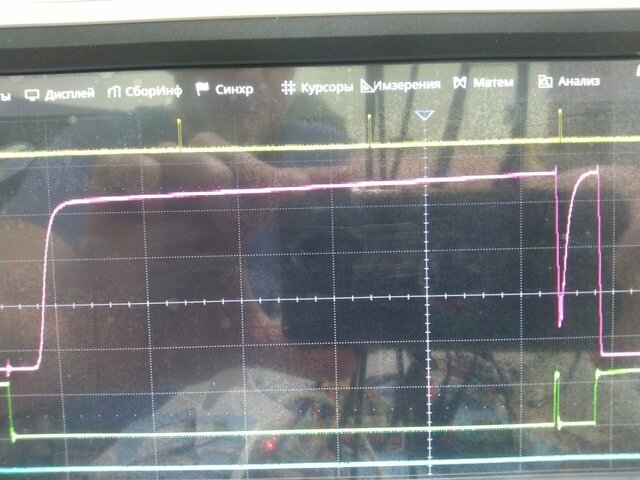
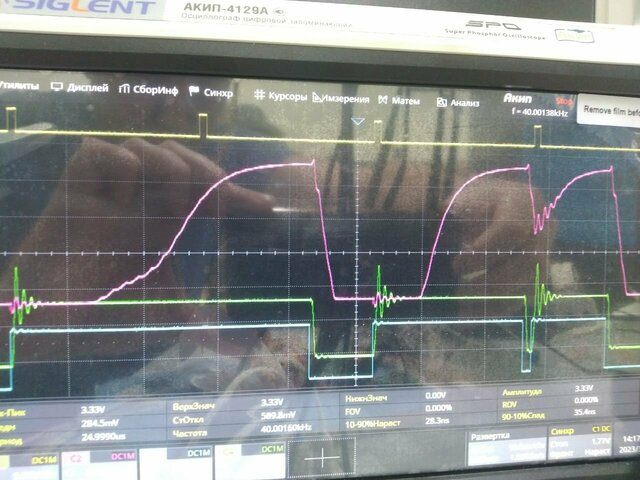
Вот осциллограмма. Частота 40кГц. На осциллограмме показан один период такого ШИМа (нарастание - спад тока). Желтый - усиленный сигнал с шунта (в нижнем плече). Розовый плавающая земля (Vs). Зеленый - сигнал с гейта верхнего ключа, синий - с нижнего ключа. Ключи в разных полумостах разумеется, они включают обмотку в одном направлении. Поскольку питающее напряжение нагрузки 40В, соответственно на верхнем скачки 10В гейта + 40В плавающей земли Vs, нижний просто 10В на гейте. Все красиво, но нижний ключ за 30сек при токе потребления катушки 0,5А разогревается до почти 100 градусов. Резисторы на гейтах по 100 Ом. Вот картинка пояснительная: И еще добавлю, что 2 драйвера IR2181S , работая с 2-мя из 4-х ключей, потребляют всего 0.007А, что очень странно. Вообще, это намекает на тот факт, что ключи не открываются, поскольку для заряда их паразитных емкостей в гейтах надо более высокий ток, я так полагаю. С другой стороны, ничего не мешает им жрать этот ток как не в себя, я не знаю почему потребление такое низкое. Судя по графикам, открываются они на 10В, что более чем достаточно для работы. Вот что тут может быть не так?
-
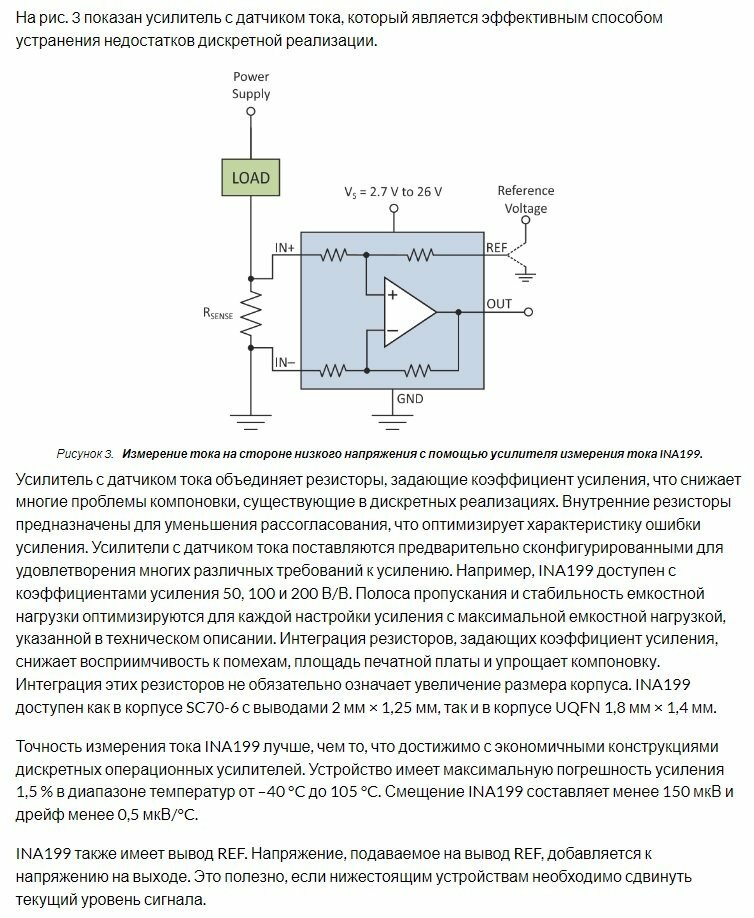
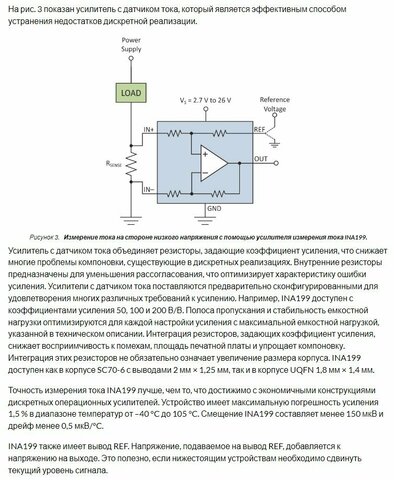
Я подключил по такой схеме, REF соединил с GND: https://www.radiolocman.com/review/article.html?di=646739 Так что сейчас буду пробовать AD620
-
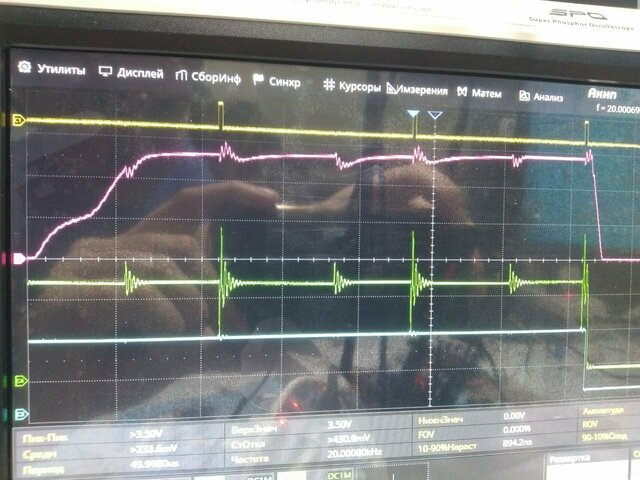
В общем я не понимаю что делать. Какой-то бред. Тут два по пять элементов, и они работают как хотят. Почему так сложно?? Это же просто долбаный усилитель, к которому приделан компаратор и триггер, почему все работает то через *опу?! Доходит до тупости, я ставлю 5В на питание ключей (отдельно от всего остального) - ток вырастает в 2 раза, по сравнению с ситуацией, когда 12В питания! Ну это вот как понимать? Почему вот это вот происходит? Зеленый - напряжение на обмотке (A0), желтый - ШИМ (период 50мкс), которая включает триггер, фиолет - выход с усилителя. Почему слева задержка между появлением напряжения и началом реакции усилителя, а справа он реагирует мгновенно? Почему рост напряжения почти горизонтальная линия, после резкого роста? Потому что катушка впитывает ток в это время? Ну а как тогда отследить четкое время переключения компаратора, чтобы ключ всегда открывался на один и тот же период? Потому что происходит вот что: Или вот это: частота 40кГц, развертка 10мкс на сетку, синяя линия - управляющий сигнал на драйвер, зеленый - напряжение на обмотке сразу после шунта, и опять видим что? Задержку слева 10мкс между появлением напряжения на обмотке! И отсутствие задержки справа! Это вот что такое?! Короче сейчас я перенесу шунты в под нагрузку и буду мерять прямо с шунта осцилом
-
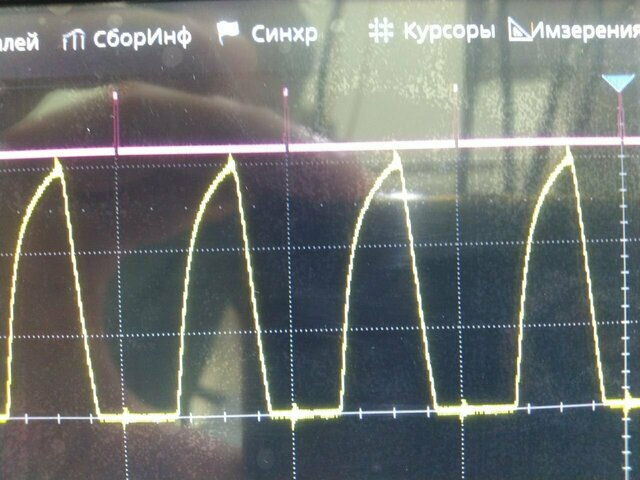
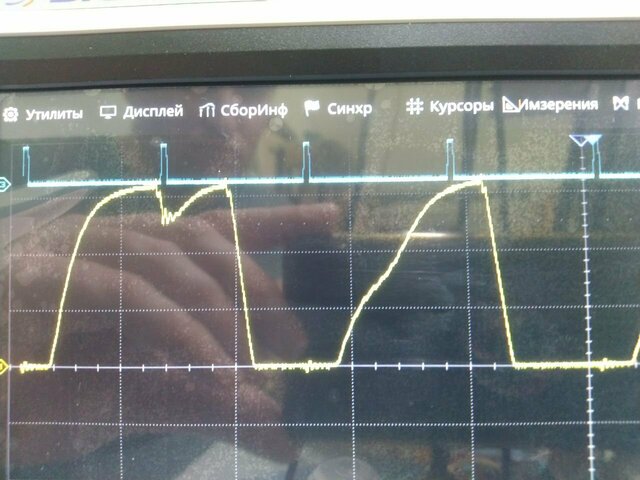
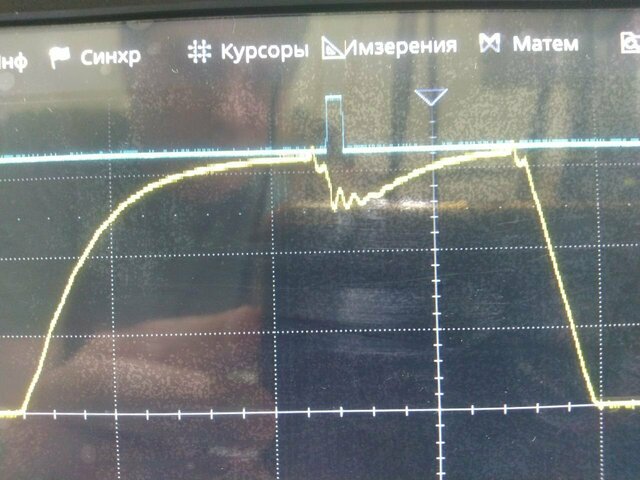
Итак, схема в приложениях. 0001.pdf Здесь общая связь блоков. Листа galv_isol_out нет, схема собрана сейчас без него. То же самое can_trans. 0002.pdf Лист с полумостом (один драйвер плюс 2 ключа) 0003.pdf Лист с контуром контроля тока. Насколько я понял, ток в катушке в момент отключения всех транзисторов существует сам по себе, а точнее, должен сливаться через диоды, так что вопрос про то, почему на шунте я вижу резкие спады напряжения, снимается. Я пока что не ставил шунт непосредственно на входе на обмотку, но думаю это уже неактуально. Тут вот какой момент образовался. В режиме удержания мотор издает звуки. Т.е., если установить его в один из микрошагов, он может стоять спокойно, а может звенеть, тарахтеть, или еще что-то. При этом осциллограмма напряжения на шунте с трудом ловится осциллографом по причине постоянно изменяющегося периода этого графика "рост-падение" (изменение в пределах около 5%). Более того, иногда возникают моменты, когда одна такая кривулина не укладывается в ШИМ, который я использую для взведения D-триггера, в результате чего драйвера и ключи постоянно включаются на разную длительность, что приводит к неравномерному питанию обмоток током. Соответственно отсюда и звук. Этот вывод косвенно подтверждается фактом, что в момент отключения одной и обмоток (одна полностью отключена, другая на максимуме - таких ситуаций за один электрический оборот всегда 4 штуки) мотор бесшумен. Вот график изменения напряжения на шунте при работе одной обмотки (микрошаг соответствует верхушке синусоиды), розовые пики наверху это ШИМ, взводящий D-триггер (открывающий ключи для питания обмотки): А вот как выглядит проблемная ситуация со звуковыми эффектами (синий график - ШИМ): Обратите внимание, справа нормальная ситуация, а слева - сбой. Собственно, из-за него периодически катушка запитывается бОльшим током, и в результате звенит. Как от нее избавиться в рамках постоянного ШИМ (сейчас 40кГц), я не знаю. Вот поближе: Здесь происходит следующее. Ток в цепи питания обмотки растет до уровня, определяемого ЦАП. В определенный момент срабатывает компаратор, и выдает на свой выход "0". Этот "0" сбрасывает взведенный ранее при помощи ШИМ D-триггер. Ток начинает падать (в шунте быстрее, в катушке медленнее), но тут снова прилетает импульс ШИМ, и триггер взводится, открывая ключи. После чего таки происходит рост до уровня ЦАП (снова) и сброс на ноль. Такие ситуации случаются произвольно, угадать их не получится, как я понимаю. Есть одно решение, но хотелось бы узнать, может что-то можно сделать именно в рамках метода, подразумевающего постоянный ШИМ. Что я упускаю?
-
То есть чтобы увидеть I Load, куда я должен поставить шунт? Между катушкой и выходом с одного из полумостов? Вот так примерно?: