Mikhail_015
-
Постов
15 -
Зарегистрирован
-
Посещение
Весь контент Mikhail_015
-
И опять здравствуйте. Здесь немного написано про проблему, необходимость дополнительной рамки и держать ее под 90 градусов, чтобы избежать блокировки: https://en.wikipedia.org/wiki/Gimbal_lock

-
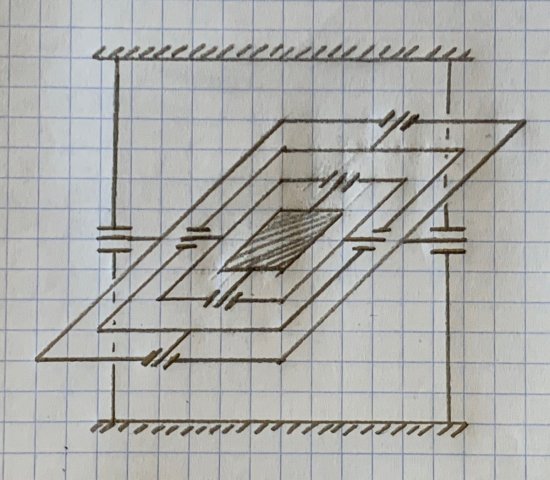
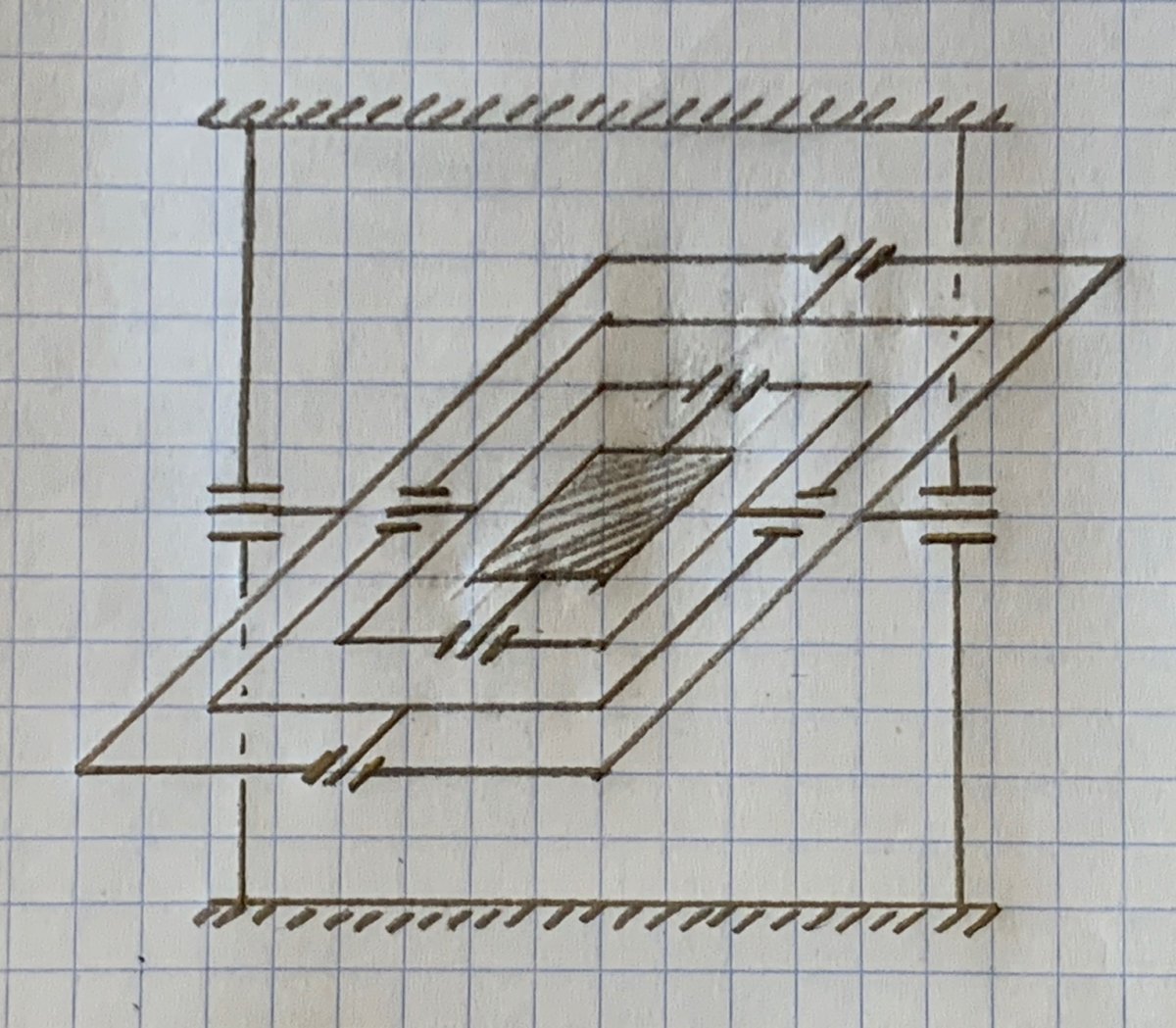
Увы, это не так. Вот , например, если бы были 3 рамки (на рисунке), и центральной рамке захочется повернуться (сориентироваться) на Восток, и быть при этом в горизонте - тогда оси 1 и 3 совпадают. И если из этого положения ей надо будет горизонтально развернуться на Юг или Север? И не важно, как в этот момент внутренняя рамка 1 сориентирована - или горизонтально, или повернута по оси 1 на какой-либо угол - она НЕ МОЖЕТ повернуться вокруг вертикальной оси (в сторону Юга или Севера) - её нет... А если бы внешняя (3-я) рамка стояла бы "на ребре", то тогда внутренняя рамка НЕ МОГЛА бы двигаться вертикально верх (ось 2 стояла бы вертикально). А если бы она была повернута на любой другой угол, например, 17 градусов, то рамка 1 не могла бы двигаться по наклонной траектории в 17 градусов... То есть, когда внутренней рамке "захочется" сориентироваться на Восток и быть при этом "в горизонте", (то есть когда СОВПАДАЮТ оси 1 и 3), то возникает проблема, о которой мы и говорим. И мы не можем в момент, когда рамке 1 захочется двинуться в "мертвую зону", сначала развернуть внешнюю рамку, и только потом дать возможность рамке 1 туда двигаться. Она (рамка 1) должна иметь возможность двигаться в любой момент куда угодно... А ведь рамка у нас такая вредная, ей наверняка "захочется" когда-нибудь занять это положение ;-) Для этого и нужна 4-я ось.
.jpeg.0fef46135fd7fe705eeea4a21f084578.jpeg)
-
Извините, я не только математик не очень, но и художник не ахти... Но примерно это может выглядеть так, как самый простой вариант рамок, "вложенных" одна в другую: