laker
-
Постов
13 -
Зарегистрирован
-
Посещение
Весь контент laker
-
Как рассчитать фильтрующий конденсатор
laker опубликовал тема в Схемотехника
Подскажите пожалуйста, есть схема, там у микросхем с разным напряжением питания стоят конденсаторы между землёй и питанием. По какой формуле они рассчитываются? Все примеры расчета из интернета, что я видел с резисторами, а тут нет резистора...
-
Гальваническая развязка
laker ответил laker тема в Схемотехника
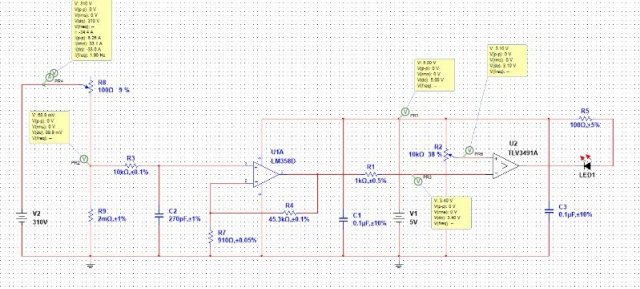
Есть маленький БК двигатель 24 В, 5 А, управляемый микроконтроллером. Шунтом измеряется ток, в фазах двигателя и если он превысит допустимый, то подаётся сигнал на микроконтроллер и двигатель должен отключаться. Схему датчика тока построил по аналогии вот с этой( Вложение ), на ней шунт изображён резистором с сопротивлением 0,002 Ом. Так вот нужна ли в данном случае гальваническая развязка? и если нужна, то в каком месте нужно развязывать (интересуюсь именно включением в схему, в каком месте мне включить оптопару)?