


Captain777
-
Постов
51 -
Зарегистрирован
-
Посещение
Сообщения, опубликованные Captain777
-
-
И уровень помех на практике на 27 мГц составляет 9+ баллов...
-
24 минуты назад, tonyk_av сказал:
Прошу прощения у sidy за свой вопрос тут, но раз уж тут заговорили о преобразователях USB-CAN и софте для них, то какие преобразователи порекомендуют более опытные коллеги? Пока требования скромные: минимальная цена, отображение сообщений из сети, отправка сообщений.
Обратите внимание на canhacker.
-
Сдвиньте частоту немного в сторону. Имейте совесть. Хотя бы на 146.100.
-
144,000-144,035 Первичная 0,5кгц Только для EME: CW 500w- 10w- 5w
-
144,035-144,110 Первичная 0,5кгц Только для EME и МS: телеграфия (связи без предварительной договоренности 144,100 МГц) 500w- 10w- 5w
-
144,035-144,110 Первичная 0,5кгц CW (вызывная частота 144,05 МГц) 50w- 10w- 5w
-
144,110-144,150 Первичная 0,5кгц Только для EME: Цифровые узкополосные виды, (JT65 144,120-144,150 МГц), CW 500w- 10w- 5w
-
144,110-144,150 Первичная 0,5кгц CW, цифровые узкополосные виды, (PSK31 вызывная частота – 144,138 МГц) 50w- 10w- 5w
-
144,150-144,165 Первичная 3,0кгц Только для EME: SSB, CW 500w- 10w- 5w
-
144,165-144,180 Первичная 3,0кгц Все цифровые виды, CW 50w- 10w- 5w
-
144,180-144,360 Первичная 3,0кгц SSB (вызывные 144,200 МГц и 144,300 МГц), CW 50w- 10w- 5w
-
144,180-144,360 Первичная 3,0кгц Только для МS: SSB (связи без предварительной договоренности - 144,195-144,205), CW 500w- 10w- 5w
-
144,360-144,400 Первичная 3,0кгц только для MS: все цифровые виды (вызывная частота 144,370 МГц), CW, SSB 500w- 10w- 5w
-
144,360-144,400 Первичная 3,0кгц Все цифровые виды, CW, SSB 50w- 10w- 5w
-
144,110-144,150 Первичная 0,5кгц Только для EME: CW, цифровые узкополосные виды, (JT65 144,120-144,150 МГц) 500w- 10w- 5w
-
144,110-144,150 Первичная 0,5кгц CW, цифровые узкополосные виды, (вызывная частота PSК31 – 144,138 МГц) 50w- 10w- 5w
-
144,150-144,165 Первичная 3,0кгц Только для EME: SSB, CW 500w- 10w- 5w
-
144,165-144,180 Первичная 3,0кгц Все цифровые виды, CW 50w- 10w- 5w
-
144,180-144,360 Первичная 3,0кгц SSB (вызывные частоты: 144,200 МГц и 144,300 МГц, через метеоры 144,195-144,205 МГц 500 Вт для 1 категории), CW 50w- 10w- 5w
-
144,360-144,400 Первичная 3,0кгц Все цифровые виды (вызывная частота через метеоры 144,370 МГц, 500 Вт для 1 категории), телеграфия, SSB 50w- 10w- 5w
-
144,400-144,490 Первичная 0,5кгц Только маяки (CW и цифровые) 50w- 10w- 5w
-
144,500-144,794 Первичная 25,0кгц Все цифровые виды (вызывные частоты: SSТV – 144,500 МГц RTTY – 144,600 МГц факс – 144,700 МГц АТВ - 144,525 и 144,750 МГц), (дуплекс: 144,630-144,660 МГц передача, 144,660-144,690 МГц прием), автоматические цифровые станции 50w- 10w- 5w
-
144,794-144,990 Первичная 12,0кгц Цифровые виды (АПРС – 144,800 МГц) 50w- 10w- 5w
-
144,990-145,194 Первичная 12,0кгц FM, только для ретрансляторов, прием, шаг 12,5 кГц 50w- 10w- 5w
-
145,194-145,206 Первичная 12,0кгц FM, космическая связь 50w- 10w- 5w
-
145,206-145,594 Первичная 12,0кгц FM, вызывная частота 145,500 МГц, ретрансляторы ранее записанных сообщений, шаг 12,5 кГц 50w- 10w- 5w Станциям радиолюбительской аварийной службы рекомендуется использовать частоту 145,45 МГц
-
Работа ретрансляторов ранее записанных сообщений на частоте 145,45 МГц и 145,5 МГц запрещается.
-
145,594-145,7935 Первичная 12,0кгц FM, только для ретрансляторов, передача, шаг 12,5 кГц 50w- 10w- 5w
-
145,7935-145,806 Первичная 12,0кгц FM 50 10 5 только для работы через спутники 145,806-146,000 Первичная 12,0 Все виды радиосвязи 50w- 10w- 5w только для работы через спутники.
-
-
В 03.08.2022 в 23:30, PeterS сказал:
Могу посмотреть, мне часто из Казани присылают на ремонт СДЭКом 3-4 дня (около 420р).
У СДЕК сейчас акция "Посылочка". 350руб по России вместе с коробочкой.
-
Addon надо ставить от GD, чтобы правильно регистры показывал IAR или Кейл.
-
Было такое на GD32F105. Передача идет - приема нет. Вылечилось изменением порядка инициализации. STM при этом работал. После, одна прошивка заработала и на STM и на GD. Тоже самое и с USB было.
-
Может вот это?
-
Спасибо!!! Хорошая идея.
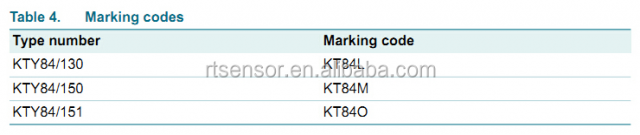
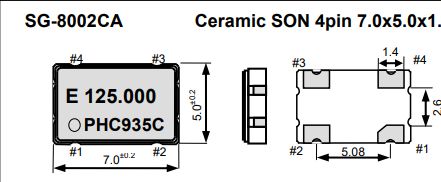
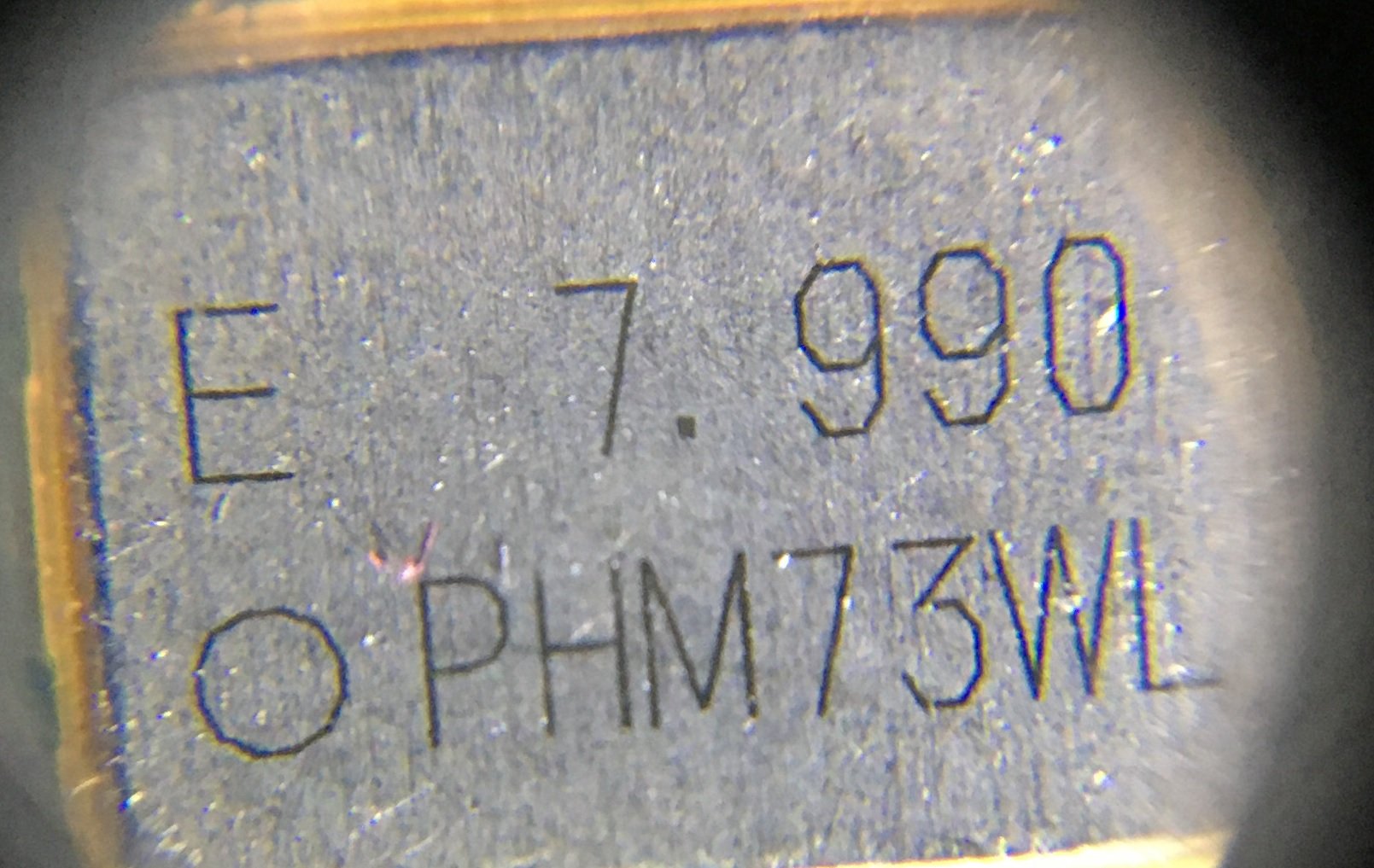
Собственно исходя из маркировки в описании - это как раз и есть SG-8002CA
-
Приветствую всех!
Есть два неисправных устройства. В обоих одно и тоже - отказал генератор. SMD 5x7 мм, 4 вывода, 5 вольт, 7.990 МГц.
Нигде не могу найти такой или аналог.


-
Ох е))))) Не досмотрел ))))
-
Опубликовано · Изменено пользователем Captain777 · Пожаловаться
Это больше ответ ТС на его вопрос.
-
Опубликовано · Изменено пользователем Captain777 · Пожаловаться
Я подключался на живом автомобиле к FD CAN. Там одновременно сосуществуют посылки стандартные и FD. Никто никому не мешает. FD принимает весь трафик, стандартный только стандартные посылки. Друг другу они не мешают.
PS. Кому интересно - могу лог скинуть.
-
В автозапчастях надо спросить (например https://bi-bi.ru/product/e0000962102)
-
Опубликовано · Изменено пользователем Captain777 · Пожаловаться
26.08.2021 в 11:49, andron_h сказал:У меня сейчас в один буфер от машины в панель, в другой из панели в машину. Думаете пропускать через один? Можно взглянуть на реализацию приема передачи, сама оброботка фильтрации и подмены данных мне не интересна. С контрольками под vag я разобрался там crc8H2F с дополнительным числом в зависимости от счетчика и ID.
Настройка прерываний
void NVIC_Config_CAN(void) { NVIC_InitTypeDef NVIC_InitStructure; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); NVIC_InitStructure.NVIC_IRQChannel = CAN1_RX0_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); /* Enable FIFO 0 message pending Interrupt */ CAN_ITConfig(CAN1, CAN_IT_FMP0, ENABLE); NVIC_InitStructure.NVIC_IRQChannel = CAN1_RX1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x1; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); /* Enable FIFO 1 message pending Interrupt */ CAN_ITConfig(CAN1, CAN_IT_FMP1, ENABLE); NVIC_InitStructure.NVIC_IRQChannel = CAN2_RX0_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x1; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); /* Enable FIFO 0 message pending Interrupt */ CAN_ITConfig(CAN2, CAN_IT_FMP0, ENABLE);
Прием от машины всех ненужных пакетов - передача в приборку
void CAN1_RX0_IRQHandler(void) { if (CAN_GetITStatus(CAN1, CAN_IT_FMP0) != RESET) { CAN_Receive(CAN1, CAN_FIFO0, &Can1RxMessage); // Читаем почту Can1TxMessage.StdId = Can1RxMessage.StdId; Can1TxMessage.ExtId = Can1RxMessage.ExtId; Can1TxMessage.RTR = Can1RxMessage.RTR; Can1TxMessage.IDE = Can1RxMessage.IDE; Can1TxMessage.DLC = Can1RxMessage.DLC; Can1TxMessage.Data[0] = Can1RxMessage.Data[0]; Can1TxMessage.Data[1] = Can1RxMessage.Data[1]; Can1TxMessage.Data[2] = Can1RxMessage.Data[2]; Can1TxMessage.Data[3] = Can1RxMessage.Data[3]; Can1TxMessage.Data[4] = Can1RxMessage.Data[4]; Can1TxMessage.Data[5] = Can1RxMessage.Data[5]; Can1TxMessage.Data[6] = Can1RxMessage.Data[6]; Can1TxMessage.Data[7] = Can1RxMessage.Data[7]; CAN_Transmit(CAN2, &Can1TxMessage); InitCan1RxMessage (); } }
Прием нужных для изменения ID и отправка в приборку
void CAN1_RX1_IRQHandler(void) { if (CAN_GetITStatus(CAN1, CAN_IT_FMP1) != RESET) { CAN_Receive(CAN1, CAN_FIFO1, &Can1Fifo1RxMessage); Can1Fifo1TxMessage.StdId = Can1Fifo1RxMessage.StdId; Can1Fifo1TxMessage.ExtId = Can1Fifo1RxMessage.ExtId; Can1Fifo1TxMessage.RTR = Can1Fifo1RxMessage.RTR; Can1Fifo1TxMessage.IDE = Can1Fifo1RxMessage.IDE; Can1Fifo1TxMessage.DLC = Can1Fifo1RxMessage.DLC; Can1Fifo1TxMessage.Data[0] = Can1Fifo1RxMessage.Data[0]; Can1Fifo1TxMessage.Data[1] = Can1Fifo1RxMessage.Data[1]; Can1Fifo1TxMessage.Data[2] = Can1Fifo1RxMessage.Data[2]; Can1Fifo1TxMessage.Data[3] = Can1Fifo1RxMessage.Data[3]; Can1Fifo1TxMessage.Data[4] = Can1Fifo1RxMessage.Data[4]; Can1Fifo1TxMessage.Data[5] = Can1Fifo1RxMessage.Data[5]; Can1Fifo1TxMessage.Data[6] = Can1Fifo1RxMessage.Data[6]; Can1Fifo1TxMessage.Data[7] = Can1Fifo1RxMessage.Data[7]; Тут все считаем и CRC тоже Can1Fifo1TxMessage.Data[0] = CrcSea; Can1Fifo1TxMessage.Data[1] = CrcBuf[0]; Can1Fifo1TxMessage.Data[2] = CrcBuf[1]; // Фильтруемые байты Can1Fifo1TxMessage.Data[3] = CrcBuf[2]; Can1Fifo1TxMessage.Data[4] = CrcBuf[3]; Can1Fifo1TxMessage.Data[2] = 0x00; // Фильтруемые байты Can1Fifo1TxMessage.Data[3] = 0x00; } } CAN_Transmit(CAN2, &Can1Fifo1TxMessage); InitCan1Fifo1RxMessage (); } }
Со стороны приборки - все проще
void CAN2_RX0_IRQHandler(void) { if (CAN_GetITStatus(CAN2, CAN_IT_FMP0) != RESET) { CAN_Receive(CAN2, CAN_FIFO0, &Can2RxMessage); // Читаем почту // Can2TxMessage.StdId = Can2RxMessage.StdId; Can2TxMessage.ExtId = Can2RxMessage.ExtId; Can2TxMessage.RTR = Can2RxMessage.RTR; Can2TxMessage.IDE = Can2RxMessage.IDE; Can2TxMessage.DLC = Can2RxMessage.DLC; Can2TxMessage.Data[0] = Can2RxMessage.Data[0]; Can2TxMessage.Data[1] = Can2RxMessage.Data[1]; Can2TxMessage.Data[2] = Can2RxMessage.Data[2]; Can2TxMessage.Data[3] = Can2RxMessage.Data[3]; Can2TxMessage.Data[4] = Can2RxMessage.Data[4]; Can2TxMessage.Data[5] = Can2RxMessage.Data[5]; Can2TxMessage.Data[6] = Can2RxMessage.Data[6]; Can2TxMessage.Data[7] = Can2RxMessage.Data[7]; CAN_Transmit(CAN1, &Can2TxMessage); InitCan2RxMessage (); } }
-
На HAL удалось только демоверсию сделать. В реальной машине (задача та же BMW G серия) получилось только на SPL. Поток данных от авто к панели значительно выше, чем в обратную сторону, поэтому правильно надо настроить приоритеты. Используйте два буфера FIFO - через один отправляете пакеты не фильтрованные, через второй по маске обрабатываете нужные ID. Не забываем про правильное вычисление контрольных сумм. Могу сказать, что задача эта далеко не такая простая - как кажется на первый взгляд.
-
Мне кажется maniac имеет ввиду, что программатор прекрасно записывает данные в этот чип. Для этого Vpp должно быть 12 вольт. Но он ничего не говорил про стирание. А для чего подняли этот некропост?
-
Так а нельзя спросить там где покупаете? Вот один из продавцов кабеля прямо пишет про инструмент : "Для СВЧ кабеля MULTIFLEX 86-04 компания HUBER+SUHNER предлагает широкую гамму соединителей и необходимый для их монтажа инструмент."
-
-
Operating temperature range
-40
+85
°CStorage temperature range
-55
+150
°В декабре пришлось перейти на GD32F105. 4 000 устройств продано. Пока отказов не было. В Питере Элтех ими занимается.
-
4 часа назад, ovn сказал:
В режиме CAN_MODE_NORMAL, уже не работает, смотрю логическим анализатором, на ножках тишина, приёма нет.
Вам надо иметь минимум два устройства с трансиверами, что бы в таком режиме работало. Пока физически шины не будет - ничего не заработает. Это не UART.
-
-
Это mitsumi. Их значек и маркировка.

-
7 часов назад, JohnKorsh сказал:
При соединении платы с ЖКИ дисплеем встречал соединения в виде столбика из чередующихся слоёв проводника и изолирующей прокладки.
Если не ошибаюсь, это называется "анизотропная токопроводящая резина".
-
Я использовал "Клей теплопроводящий Радиал 2гр. Keller". Клеил радиаторы 20*20 на выходные транзисторы в плазменном телевизоре. Держится хорошо, точно теплопроводный )))) Демонтаж простой - поворачиваем радиатор на 90 градусов и все. )))


Твердотельный накопитель NVMe M.2 2280 для любителей музыки от UDinfo
в Объявления пользователей
Опубликовано · Пожаловаться
Звучит так, как будто нейронка писала )