Focus
-
Постов
56 -
Зарегистрирован
-
Посещение
Весь контент Focus
-
Доброго времени суток! На генераторе Agilent E8257D вышел из строя переход на SMA (разрушен центральный контакт). Необходимо его заменить, но никак не могу найти его каталожный номер. На фото разъем генератора и переход с двух сторон. Обращался в техподдержку, но они предложили привезти генератор в ремонт для замены этой детали. Подскажите, пожалуйста, где можно найти такую штуку, или хотя бы тип разъема на генераторе (из мануала понять не смог, т.к. он зависит от установленных опций).



-
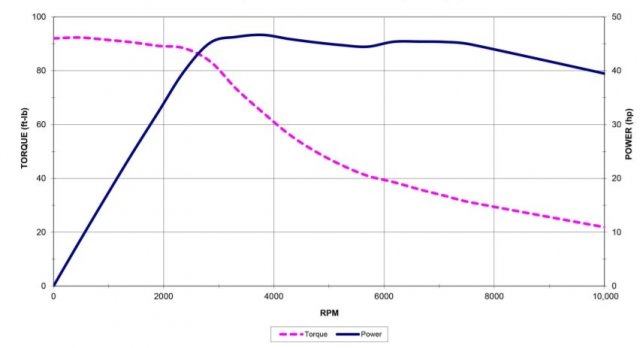
Доброго времени суток! Перечитав огромное кол-во форумов я так и не нашел явного ответа, как заставить обычный бытовой (промышленный) асинхронный двигатель комфортно работать на частотах более 70-80Гц. Пишут что железо греется, подшипники сыпятся. Однако явно есть какие-то решения, позволяющие разогнать четырехполюсный асинхронник с номинальными оборотами 1500 и номинальной частотой 50Гц до 9-12 тыс. об/мин (естественно с потерей момента). В промышленном станочном приводе это реализовано. На картинке график крутящего момента шпиндельного двигателя. Из него видно, что максимальный момент мы имеем на 2500об/мин, а затем он плавно падает. Т.е. выше этих оборотов индуктивность обмоток делает свое дело и максимально возможный ток плавно снижается. Собственно вопрос. Какие решения необходимо применить, чтобы асинхронник с номинальными оборотами 1500 раскрутить до 8000 и при этом он мог стабильно работать? Я вижу следующее: 1. Более тонкое качественное железо. 2. Усиление ротора от разрыва цб силой. 3. Медная заливка ротора.
-
Неадекватно большие потери в роджере 4003
Focus опубликовал тема в RF & Microwave Design
Доброго времени суток. Изготовил плату с копланарным проводником, 4 слоя, сверху и снизу роджер 4003, толщина рождера 0.305 мм. Ширина проводника 0.45, зазор от земли по бокам 0.15. Стекап взят из даташитов на СВЧ компоненты от AD и Hittite. Длина проводника 50 мм. Замеры показали потери на 10 ГГц около 4 дБ. Решил проверить не виноваты ли разъемы и отпилил кусок платы, такой, чтобы разъемы стали почти встык и получил потери менее 0.5 дБ. Программы расчета и техдокументация на роджер говорит, что потери должны быть около 0.1 дБ на см. Т.е. выходит, что у меня потери в 10 раз больше. Вопрос, что делать. Возможно у кого-либо есть опыт работы с этим материалом?