:-)
Свой-
Постов
218 -
Зарегистрирован
-
Посещение
Весь контент :-)
-
Xilinx SDK
:-) ответил dxp тема в Системы на ПЛИС - System on a Programmable Chip (SoPC)
Спасибо большое! Ваши ответы всегда очень интересно и познавательно читать. -
Xilinx SDK
:-) ответил dxp тема в Системы на ПЛИС - System on a Programmable Chip (SoPC)
Подскажите, а как вы собираете проекты xsdk вне этой оболочки? Создаёте ли заранее bsp в ней и потом используете? Или как-то по-другому? Аналогично с hw? Самого меня раздражает, что изменение состава используемых библиотек bsp приводит к сбросу части настроек. И приходится ручками по gui тыкать повторно. И ещё неясно, что хранить в системе контроля версий: только ли свой проект, но тогда ещё надо бы описывать вот все шаги по настройке bsp. В общем - не подскажете, есть ли более удобный путь, чем тот, который по умолчанию навязан xilinx?.. -
Любопытно, а чем закончился поиск проблемы? ЗЫ Столкнулся с подобной проблемой на zynq-7000. Ведётся работа в режиме AMP: на одном ядре Linux, на другом FreeRTOS. При некоторых условиях всё намертво зависает. Под подозрением FreeRTOS-ная часть. Но нет опыта разбирательства с такими штуками. Подскажите, что почитать по coreSight? Как разобраться с trace? Где бы увидеть примеры использования и поиска подобных багов?..
-
Какой протокол использовать поверх UDP или TCP
:-) ответил :-) тема в Интерфейсы
Google по фразе " Run-Time Debugging Tool " вывел на FreeMASTER Run-Time Debugging Tool. Ещё посмотрел на ucProbe. Интересные штучки, не знал о таком. В принципе половину задачи они могут помочь решить. Одна из целей действительно посмотреть как что-то крутится в некоторой программе управления в режиме реального времени. И такими штуками это, как будто, красиво получается. Но есть ещё одна подзадача - это передача тестовых воздействий с ПК в устройство. (Вернее программа на Cortex-a9 должна будет передать данные в память ПЛИС и далее считать результат обработки и сравнить с тем, что должно быть. А всё крутится на Zynq7000). Может, для такого тоже есть что-то готовое? Для изучения и вдохновения... В общем-то тоже придерживаюсь мнения, что потерь быть не должно. Впрочем потеря пакетов допустима и вряд ли сильно помешает. UDP или TCP - это, скорее, для упрощения реализации программы на ПК. (Можно, наверное, и до голых Ethernet-кадров опуститься. В 1,5 кБ должны умещаться отдельные кванты телеметрии). Так вот я и пытаюсь разобраться какие протоколы существуют и их пригодность. MQTT пугает каким-то непонятным слоем брокер. Вроде бы, для моей задачи ненужная штука. Я уже выше приводил пример альтернативного протокола: Constrained Application Protocol. Он поверх UDP реализуется. И не содержит никакого брокера. ЗЫ Вообще, конечно, чувствую, что изобретаю какой-то велосипед... -
Какой протокол использовать поверх UDP или TCP
:-) ответил :-) тема в Интерфейсы
- платформа cortex-A - клиент - некая программа для пользователя - как таковой сети и не предполагается. В 98% случаях - вся сеть состоит из 1ого ПК и 1ого управляемого устройства. В 2% может быть несколько устройств (<5) А чем плох непрерывный поток? С первого взгляда он упрощает ПО на ПК, выполняющее функции управления и приём данных "телеметрии". ("Телеметрия" - это некие данные о состоянии устройства, передаваемые с темпом 1кГц. Запрашивать на ПК данные с темпом 1кГц - как-то страшно.) MQTT с первого взгляда кажется избыточным. Вот видел альтернативу в виде CoAP ( https://en.wikipedia.org/wiki/Constrained_Application_Protocol ) - как будто попроще. Использовал ли кто-нибудь? Возможно, имеет смысл придумать и что-то своё, но думал, что задача слишком уж типовая. И должно быть что-то готовое. Текущее резюме из советов в теме: 1. Лучше UDP, чем TCP. Хотя и TCP тоже норм. 2. Писать либо свой протокол, либо MQTT. Уточню пару нюансов: 1. Работа через большую сеть/интернет не предполагается и не требуется (хотя, если окажется опцией, то отлично). Ethernet выбран - потому что хорошая скорость и доступность почти на любом ПК. 2. Телеметрия - это режим работы при отладке прибора "на столе". В готовом устройстве будет только управление: вкл/выкл, выбор режима и т.д. 3. На ПК предполагается специальная программа для пользователя. -
Какой протокол использовать поверх UDP или TCP
:-) ответил :-) тема в Интерфейсы
Сценарии использования видятся следующими: 1. Запрос параметра - возврат параметра; 2. Запрос телеметрии - непрерывный поток данных телеметрии до запроса отмены телеметрии. Соединение точка-точка. -
Какой протокол использовать поверх UDP или TCP
:-) опубликовал тема в Интерфейсы
Добрый день! Есть задача реализовать управление неким устройством через Ethernet-соединение (1G). Требуется управлять включением/выключением некоторых функций. Также требуется при необходимости получать телеметрию (скорость потока - 1..10 Мбайт/с, может и выше в перспективе). (На устройстве будет скорее всего FreeRTOS+lwip, но не исключен вариант и Linux). И тут возник вопрос - какой протокол использовать поверх UDP или TCP соединения (ещё не выбрано)? Придумывать что-то своё? Или есть что-то типовое, что всеми используется? -
Подскажите, пожалуйста, а как можно реализовать запись потока 4GByte/s и сколько это может стоить?..
-
Случайно наткнулся вот на такую штуку: https://www.crowdsupply.com/era-instruments/erasynth Вроде бы, по теме топика.
-
Не совсем то, что надо. Хочется именно SoC, чтобы на нормальном процессоре некоторые задачи решать... О, точно! Должны возродиться: https://ez.analog.com/thread/93958
-
Только заинтересовался вот такой игрушкой: PicoZed SDR 1X1 SOM (ZYNQ 7000 + AD9364) ( http://zedboard.org/product/picozed-sdr-1x1-som ), как появилось "End of life notice". Есть ли в природе доступные альтернативы? Сам нашёл следующие: PutoSDR ( https://wiki.analog.com/university/tools/pluto ) - не совсем то, что нужно. ZYNQ самый маленький и вообще какая-то урезанная. SNOWLeo SDR (вместо AD9364 - LMS6002D) - уже не выпускается. YunSDR Y310s - вроде бы, то что надо, но непонятно где купить, сколько стоит и есть ли вменяемые примеры от китайских разработчиков. ЗЫ Интересно что ж AVNET с ANALOG DEVICES не поделили?..
-
GPS тоже возможен... В открытом поле особенно... https://www.youtube.com/watch?v=PpNhtQW0o7U
-
Извините, что вмешиваюсь. А вы работали с платками B200/B210? Если да - удавалось ли получить стабильную передачу данных при полосах 15...35 МГц? А то главное разочарование в них для меня - это постоянные потери данных при записи сигнала длиной десятки секунд (при том, что скорость дисковой системы ПК позволяет выполнять запись потоков в 10-20 раз выше требуемой).
-
:bb-offtopic: Извините, что не по теме... Скажите, а вам удалось добиться стабильной работы от B200/B210. А то не знаю как побороть постоянные разрывы при передаче данных по USB 3.0. В интернете читал только описание такой же проблемы, а решения так и не нашел. Невозможно гарантировать запись даже 30 сек при частоте дискретизации, например 16 МГц... (Дисковая подсистема ПК тут точно не при чем).
-
А если ещё немного уточнить. Положим, взять ПЛИС XC6VLX130T. В ней 480 умножителей. Максимальная рабочая частота DSP-блока - 600 МГц. Пусть частота дискретизации 4 ГГц. Пусть требуется КИХ-фильтр порядка 250. Пусть также требуется после фильтрации выполнить децимацию на 7. Тогда требуемые ресурсы оценочно получаются: (4ГГц/500МГц)/2 = 4. 250*4=1000. 1000:7 ~ 150. Т.е. с первого взгляда, как будто бы, вполне реализуемо. Верно я понимаю?
-
Ага, вот что хотелось понять... Связь числа DSP блоков (получается, что быстрые фильтры только на них), максимальной частоты DSP блока и частоты дискретизации. 5520 / 1380 = 4 (А почему тогда 8 параллелей?). 8*500МГц = 4ГГц.
-
Подскажите, пожалуйста, каковы потенциальные возможности современных ПЛИС в задаче реализации КИХ-фильтра. Скажем, есть современные АЦП с частотами дискретизации до нескольких ГГц. Например, до 4 ГГц. С разрядностью до, например, 12 бит. Понятно, что внутри ПЛИС маскимальные частоты - порядка нескольких сотен МГц. Но путем какого-нибудь хитрого распараллеливания, наверное, можно перейти от входного потока 4ГГц*12бит к чему-то, вроде, 250МГц*192бит. В общем вопрос в том, на что способны современные ПЛИС (скажем virtex 5/6/7). Какой порядок фильтра КИХ можно достичь? Каких частот можно достичь? Вопрос абстрактный - задается для осознания современного развития ПЛИС.
-
GALILEO - насколько востребовано?
:-) ответил wwo55 тема в Сотовая связь и ее приложения
Не уловил вашей мысли... Не могли бы пояснить её? Сам хочу сказать, что китайская навигационная система работает на данный момент гораздо лучше еврпейской. По крайней мере в белокаменной можно не напрягаясь принять сигнал от не менее, чем 4 спутников и определить свои координаты. А вот чтобы поймать сигнал от всех 4 спутников галилео - нужно постараться... такая радость длится не более пары часов в сутки... Кстати, в китайскую систему входят не только среднеорбитальные спутники, но и геосинхронные и геостационарные. Последние передают в дополнение ко всему ионосферные поправки по аналогии с дугими sbas. т.е. возможность диф.коррекции заложена в саму систему, а не в её дополнение. -
Дифференциальный GPS (RTK)
:-) ответил KARLSON тема в Сотовая связь и ее приложения
Хм... Наверное, не более 1 метра имелось в виду... Для RTK задач полно приемников. Посмотрите у таких производителей, как www.javad.com http://www.septentrio.com/ http://www.novatel.com/ http://www.trimble.com/ http://www.furuno.com/en/business_product/gps/index.html Обычно это многочастотные, многосистемные приемники геодезического класса. Но и цена на них соответствующая (единицы-десятки тысяч $). Но в последние годы появилась возможность решать RTK-задачи дешевыми приемниками. Например, navis nv08c-csm или ublox LEA6-T или skytraq s1216 в сочетании с open-source программой RTKlib (http://www.rtklib.com/) позволяют получать RTK решения на небольших базах до нескольких км. Один из важных вопросов в дешевых решениях - выбор подходящей антенны. Т.к. для надежной работы требуется высококачественная навигационная антенна. -
Если предполагается сделать что-то, вроде, современного аналога GP4020 ( http://www.microsemi.com/products/product-directory ), поддерживающего кроме GPS ещё и ГЛОНАСС/GALILEO/Beidou - то штука должна быть весьма интересной. По крайней мере гораздо интереснее вот такого проекта ( http://www.kickstarter.com/projects/swiftn...tk-gps-receiver ), собравшего больше 150 000$, в котором в итоге нет ничего RTK-шного на данный момент. Если же предполагается дать доступ только к части свободных ресурсов процессора, то скучно. Такое обещает тот же navis со своим, например, nv08c. Ну а много спутников очень полезно, например, для RTK-шных задач. Ну и для всяких городских условий, когда полнеба или больше закрыто высокими зданиями...
-
Анализер спектра FSL6
:-) ответил microstrip_shf тема в RF & Microwave Design
Спасибо, Ledum! Похоже, что оно... -
Анализер спектра FSL6
:-) ответил microstrip_shf тема в RF & Microwave Design
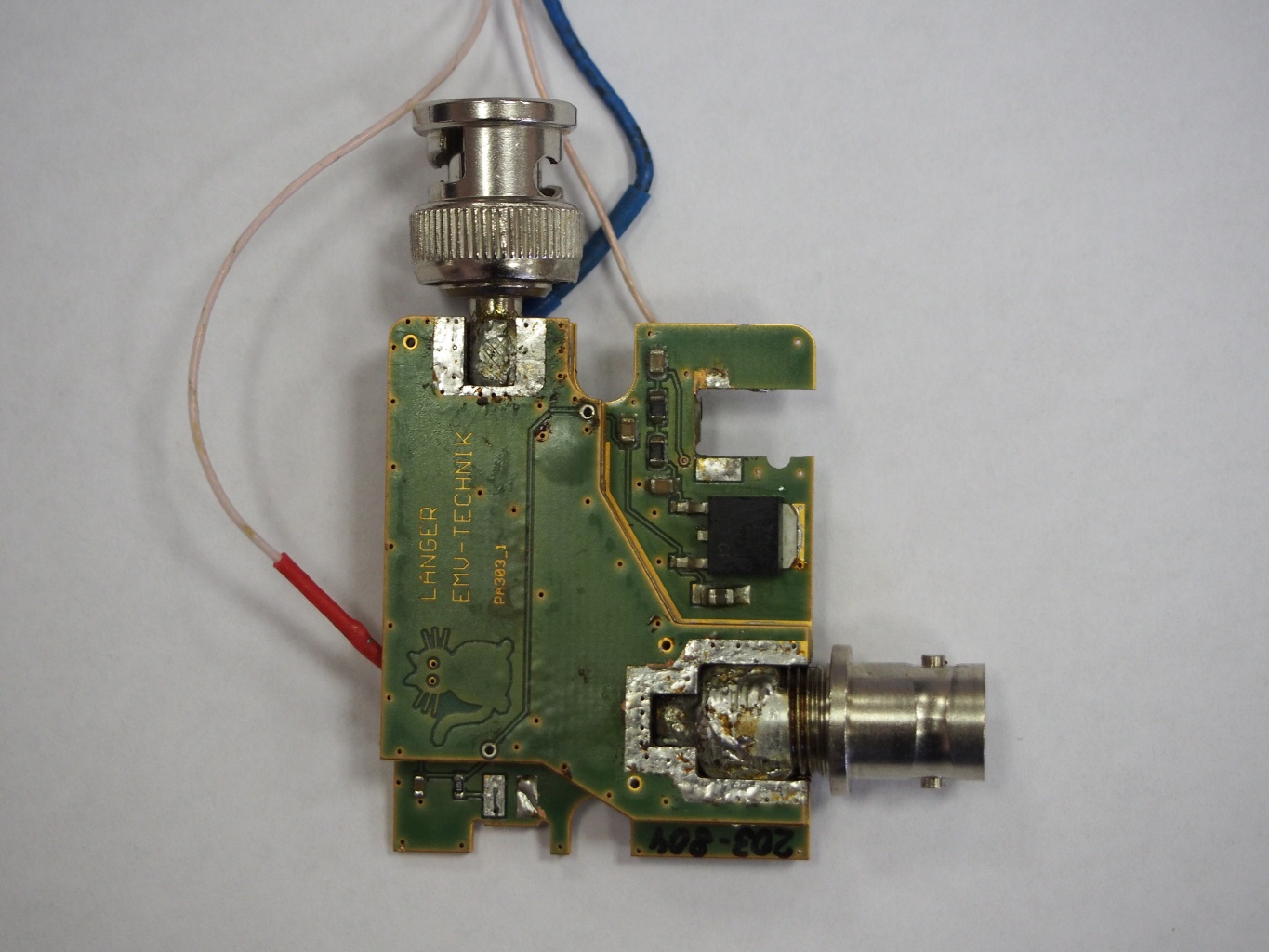
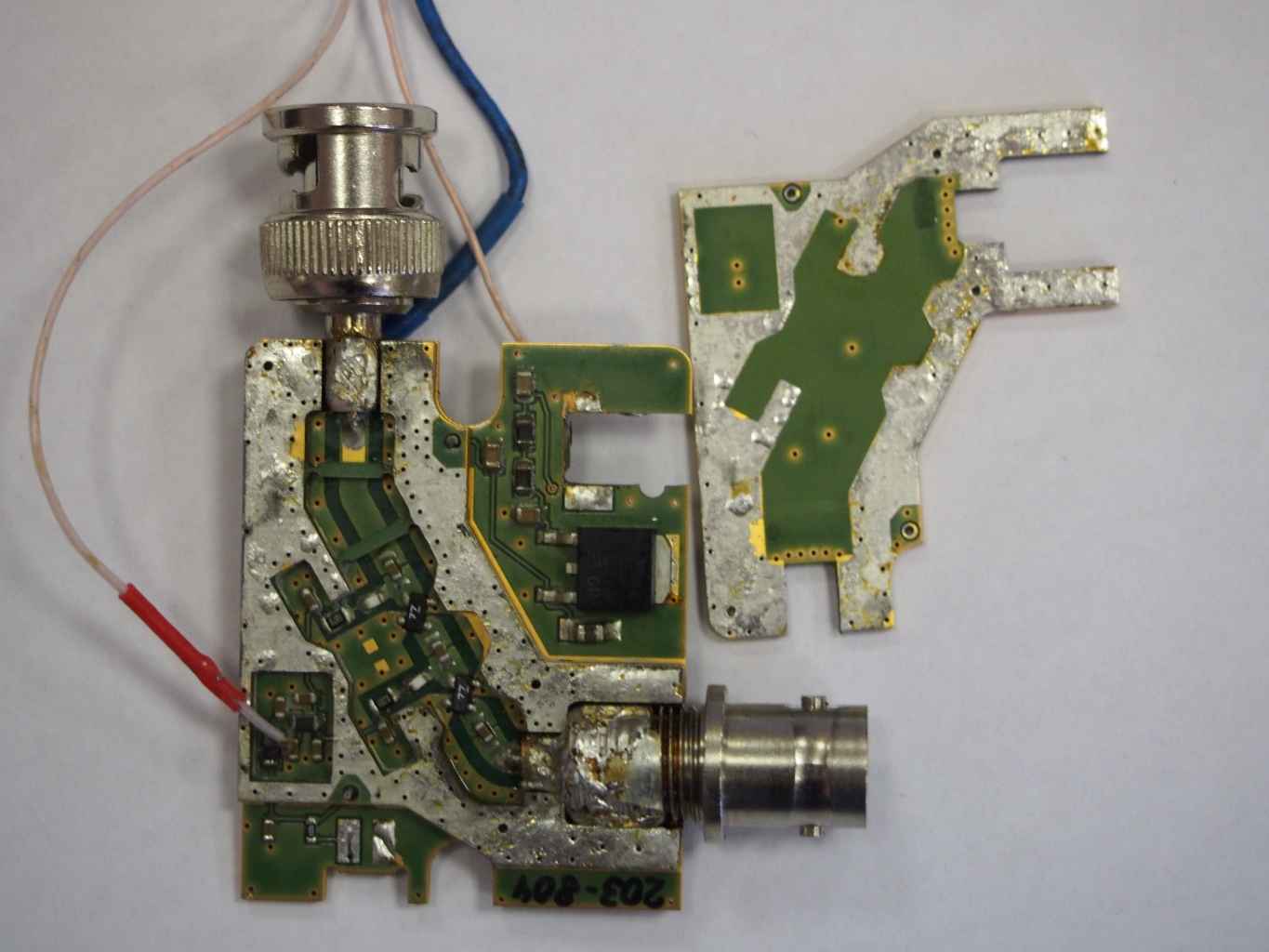
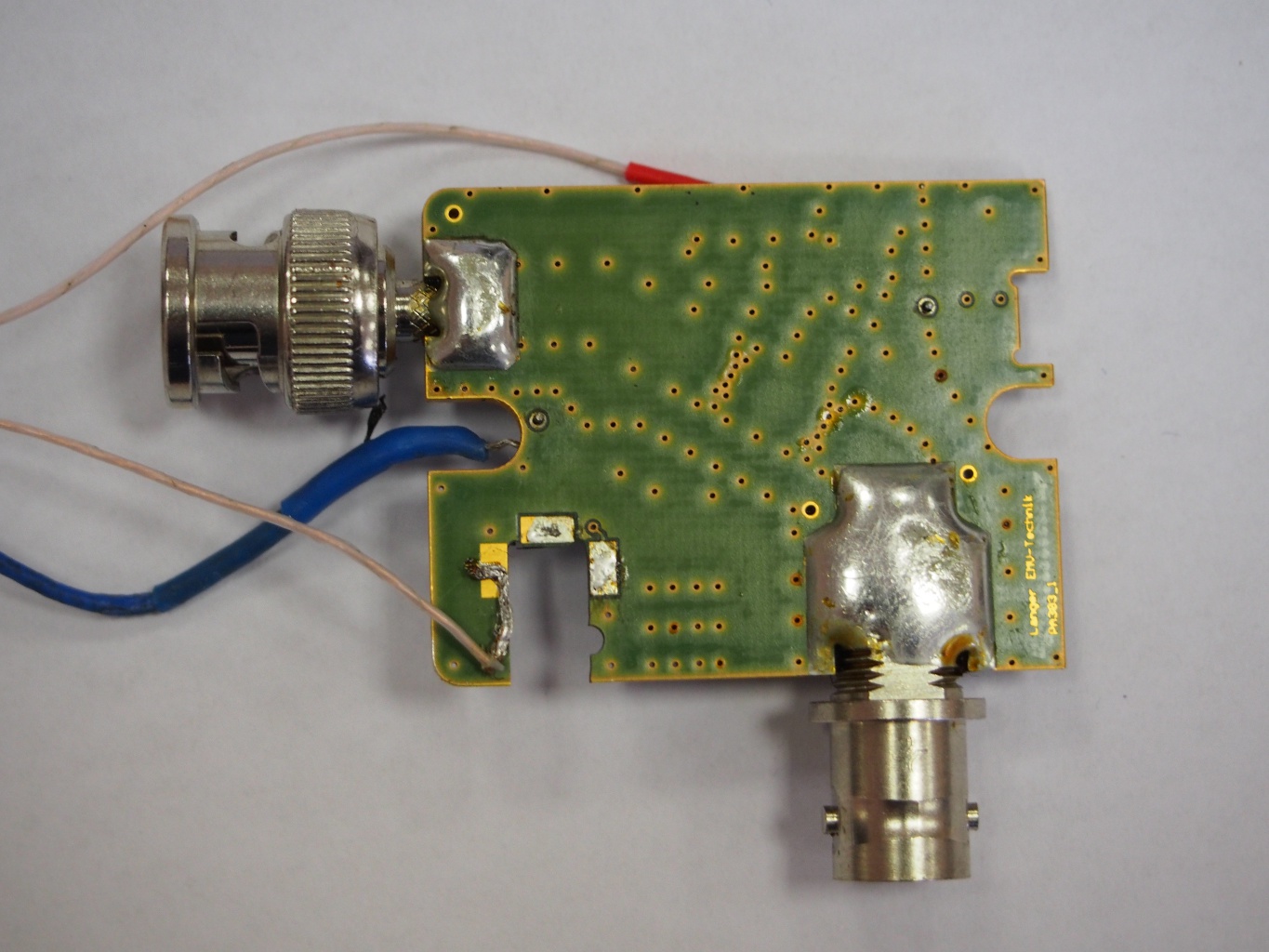
Preamplifier Langer EMV-Technik PA303 ( http://www.langer-emv.de/en/products/distu...ier/pa-203-303/ ). Не подскажет ли кто, что за транзисторы используются?

-
Так это ж... Вроде бы, уже есть порты OpenPilot и на DiscoveryF3 и на DiscoveryF4: https://github.com/lilvinz/OpenPilot/wiki/D...t-this-is-about . И есть вот такая игрушка, но на STM32F3: http://abusemark.com/store/index.php?main_...;products_id=30 с портом multiwii.
-
GPS, глонас, про нас...
:-) ответил admin тема в Форумы по интерфейсам
А ссылку на нужную работу не поможете найти? А то их там столько... Кстати, вряд ли, инерциалка может выдавать сантиметровые точности, в отличае от фазовых относительных измерениях в спутниковой навигации... Да и сколько будут стоить точные часы, вероятно, дороже навигационного приемника...