Magnet
-
Постов
106 -
Зарегистрирован
-
Посещение
Информация о Magnet
-
Звание
Частый гость
")
- День рождения 26 марта
Посетители профиля
2 433 просмотра профиля




-
Робототехнический фреймворк
Magnet опубликовал тема в Робототехника
Давно не заходил сюда, обратил внимание на новые рубрики, обнаружил и то, что годится здесь для прокачки своего творения. Framework BEEPTOOLKIT (СISC x86, OC Windows LTSC) легко устанавливается на различные PC формфактор от настольных до IPC и таблетов. Краткая характеристика: Как есть в коробке, востребован структурами R&D, которые заинтересованы иметь в своих программно-аппаратных решениях: Большое количество различных по длине, формату и количеству команд, выполняемых за несколько тактов CPU; Управление с помощью программируемой логики (визуальное кодировка инструкций); Преобладание двухадресной адресации и развитый механизм адресации операндов (переменная, над которой производят операции в коде); Много поточность, применение конечных автоматов (FSM), микро сервисов и т.д. Позволяет воплотить в коробочный продукт довольно внушительный спектр роботизированных идей, где аппаратная часть представляет собой недорогие модули, с мировых онлайн торговых полок (драйверы устройств, датчики, коммуникаторы и т.д.). Нет необходимости создавать аппаратную часть с нуля, писать, компилировать код и загружать его в контроллеры на базе RISC MCU с дизайном на разнесенных коммуникациях с сопутствующим букетом проблем, знакомых всем классическим разработчикам эмбеддерам встраиваемого программного обеспечения под Arduino, STM, ESP, Raspberry Pi, других DSP платформ и контроллеров на их базе. Сравнительная демонстрация : Решение одной и той же простой задачи разными платформами, но если понимаете, можно продолжить чтение не заостряя внимание на этих фактах: Beeptoolkit Arduino Raspbery STM 32 ESP32 FreeRTOS Пример аппаратного дизайна на готовых, практически с онлайн торговых полок , модулях.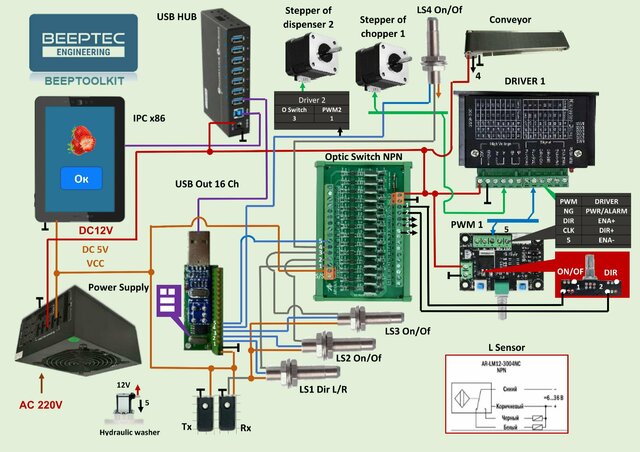
-
Всем привет, являясь разработчиком данного OEM тулкита, хочу получить вопросы и услышать экспертное мнение. Итак, что из себя представляет в.у. инструментарий и что он позволяет реализовать ее юзерам. Это desktop real-time инструментарий для разработки программной части автоматики, робототехники и смарт систем, дальнейший прототаипинг с подключением I/O. 1. Логическое ядро построено на G, минимальная аппаратная поддержка под OS Win iOT/LTSC 10, CPU 750 MHz, RAM 2 Gb, SDRAM 32 Gb, формфактор SBC, Tablet, Stick и прочие полевые боарды; 2. Это настраиваемый фреймворк с применением FSM автоматов; 3. Каждый FSM - GUI UART реализация под недорогие USB I/O; 4. В данной версии имеется возможность программной симуляции 160 выходных бинарной логики каналов, а так же аппаратно (реакция переключений между каналами 70ms); 5. До 1600 входных 12 bit каналов каналов счета ADC в пределах от 0,001 до 3,3V; 6. Поддерживаемые алгоритмы с применением таимингов - RPA, триггерные переменные обратная связь, PC зрение с триггерными функциями, вербальный построитель RPA сценариев; 7. Генерирование отчетов по каналам счета в реальном времени; 8. Настраиваемый автостарт в пределах 99:99:99 заданного времени, цикличные повторы, авто завершение, перезагрузка OS; 9. Алгоритмы обращений к встраиваемым сценариям управления выходными каналами; 10. Настраиваемые портовые I/O USB коммуникации. 11. Сохранение сгенерированного проектного кода в бинарном формате, возможность его делегирования и редактирования (среда Beeptoolkit). Так выглядит главная панель, так же представлен небольшой цикл лекций для быстрого старта, краткий свежий обзор с ссылками на предыдущие

-
Аналоговые сенсоры линии, цвета?
Magnet ответил Magnet тема в Робототехника
Речь идет не о распознавании видео объекта или его отслеживании, а выполнении процедуры контроля выхода из цветовой зоны. Сенсор льда это прикольно конечно, но речь идет конкретно об этом